

![]()
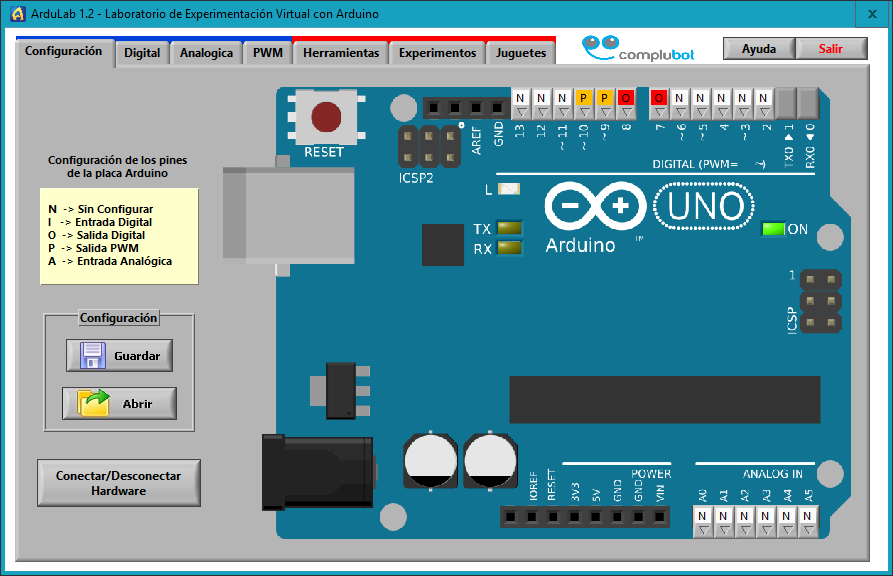
Otra de las características de la placa Arduino UNO es la posibilidad de controlar uno o varios motores, mediante el uso del correspondiente driver de potencia. En la pestaña Herramientas seleccionaremos Motores para acceder a dicha funcionalidad.
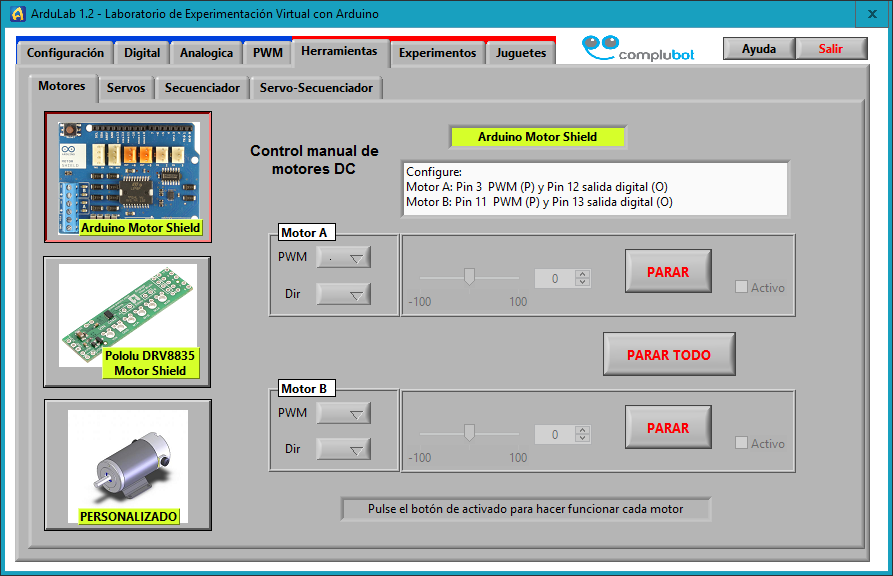
Con ArduLab podemos controlar hasta dos motores DC mediante el uso de tres tipos de driver de potencia:
- Arduino Motor Shield.
- Pololu DRV8835 Motor Shield.
- Otro tipo de driver de motores definido por el usuario.
En su forma más básica, para controlar un motor necesitamos dos salidas de la placa Arduino UNO:
- Salida digital: para controlar el setido de giro.
- Salida PWM: para controlar la velocidad del motor.
De esta forma, para el control de los dos motores soportados por cualquiera de las Shields anteriormente mencionadas, necesitaremos configurar dos salidas digitales y otras dos salidas PWM.
Arduino Motor Shield
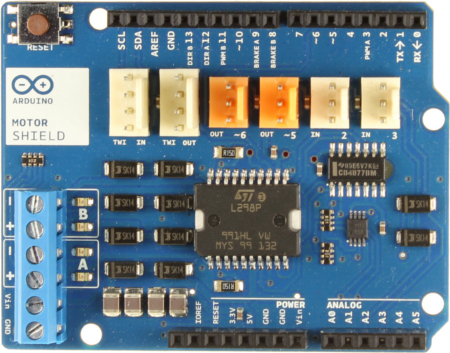
Esta placa está basada en el controlador de motores L298 (doble puente en H). Si bien este dispositivo se encuentra anticuado por su tecnología (transistores bipolares), su uso está muy difundido entre los aficionados y en la comunidad educativa.
Tal y como se indica en la propia aplicación, para poder controlar esta Shield, hay que configurar los pines 12 y 13 como salidas digitales (control del sentido de giro) y el 3 y el 11 como salidas PWM (control de la velocidad).
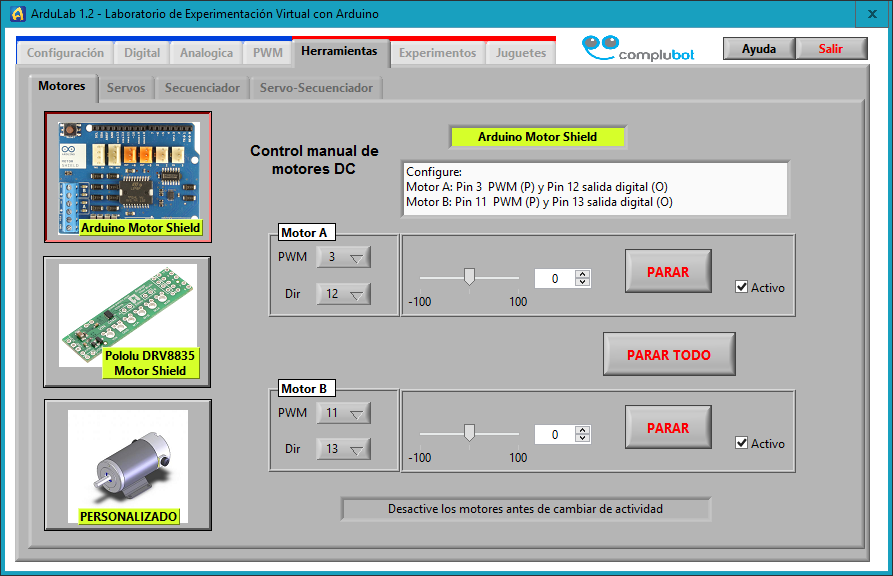
Para acceder al control de cada motor, solo hay que activar el check correspondiente y ajustar la velocidad (en %) y el sentido de giro de cada motor, con el control deslizante o con el control numérico.
Pololu DRV8835 Motor Shield
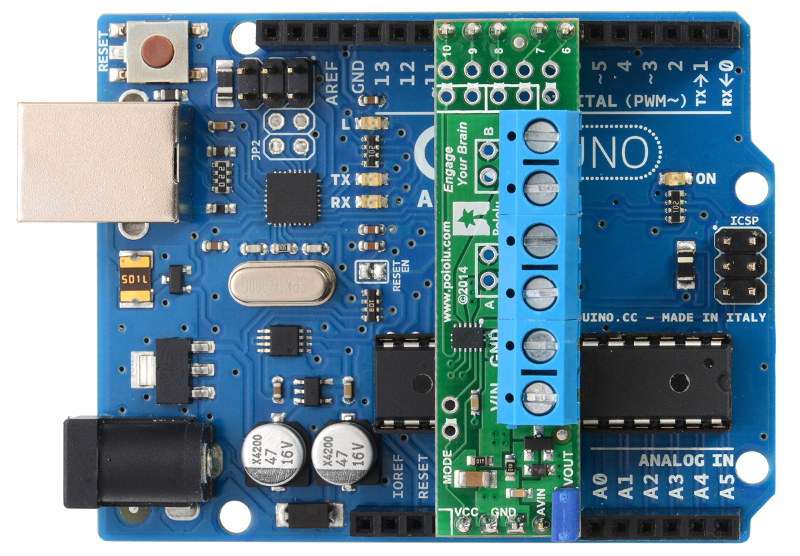
El Pololu DRV8835 Motor Shield, pertenece aa una nueva generación de controladores de motores (tecnología MOSFET) que nos proporciona unas magníficas prestaciones con una excelente relación calidad/precio. Además, esta implementación de Pololu, con un circuito impreso de mínimas dimensiones, ocupa los pines necesarios de la placa Arduino UNO, dejando disponibles el resto para otras aplicaciones.
Con este controlador hay que configurar los pines 7 y 8 como salidas digitales (control del sentido de giro) y el 9 y el 10 como salidas PWM (control de la velocidad).
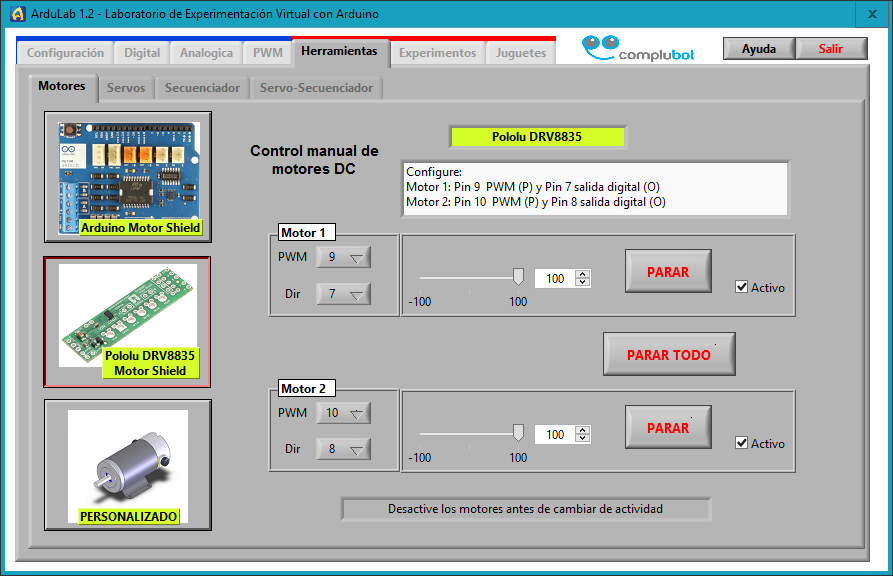
Al igual que en el caso anterior, para acceder al control de cada motor, solo hay que activar el check correspondiente y ajustar la velocidad (en %) y el sentido de giro de cada motor, con el control deslizante o con el control numérico.
Controlador de motores definido por el usuario
Si nuestro driver de control de motores es de otro tipo, o la configuración es distinta a alguna de las anteriores, disponemos de esta opción donde poder personalizar la configuración de ArduLab a nuestro montaje para el control de motores.
Ir al índice de la Ayuda de ArduLab



