Uso de las baterías recargables de Li-Ion

Las baterías de Compluino 03 son la última novedad en la tecnología de baterías recargables Li-Ion. Estas nuevas baterías incorporan una electrónica interna (en la propia batería) que las hace muy seguras, protegiéndolas de sobre cargas y cortocircuitos.
A pesar de esto, todas las baterías recargables hay que manejarlas con cuidado, leyendo y siguiendo las indicaciones de seguridad que nos proporciona el fabricante en el manual de uso (incluido en la caja del robot). Además de estas medidas de seguridad, tendremos en cuenta lo siguiente:
- Quitar y guardar las baterías en su caja de plástico protector siempre que pasemos un tiempo sin usar el robot
- Desmontar las baterías del robot siempre que vayamos a soldar algún elemento o a realizar cualquier tarea de mantenimiento en el robot
Antes de empezar a utilizar el robot con las baterías nuevas, es recomendable hacer un ciclo completo de carga. Para ello usaremos el cargador que viene con el robot y un alimentador de 5V/1A (no incluido). Puedes usar el alimentador del móvil o la tablet siempre que den 1A mínimo y tengan una conexión micro-USB. Nunca utilices la conexión directa a un puerto USB de un portatil, ya que estos (los USB 2.0) dan como máximo 0,5A.
 |
 |
| Batería en proceso de carga (ledes en color rojo) | Carga finalizada (ledes en color verde) |
El tiempo de carga de las baterías puede superar las 4 horas (dependiendo del estado de carga inicial), si bien dada la capacidad de estas baterías (2200mA/h) podemos disponer varias horas de uso intensivo del robot, e incluso de varios días o semanas de uso esporádico en un entorno educativo.
Tu primer programa con Compluino 03
La forma más sencilla de programar Compluino 03 es mediante el uso de sus propias librerías. Así que te recomendamos que instales el IDE de Arduino y las librerias de Compluino 03 antes de continuar.
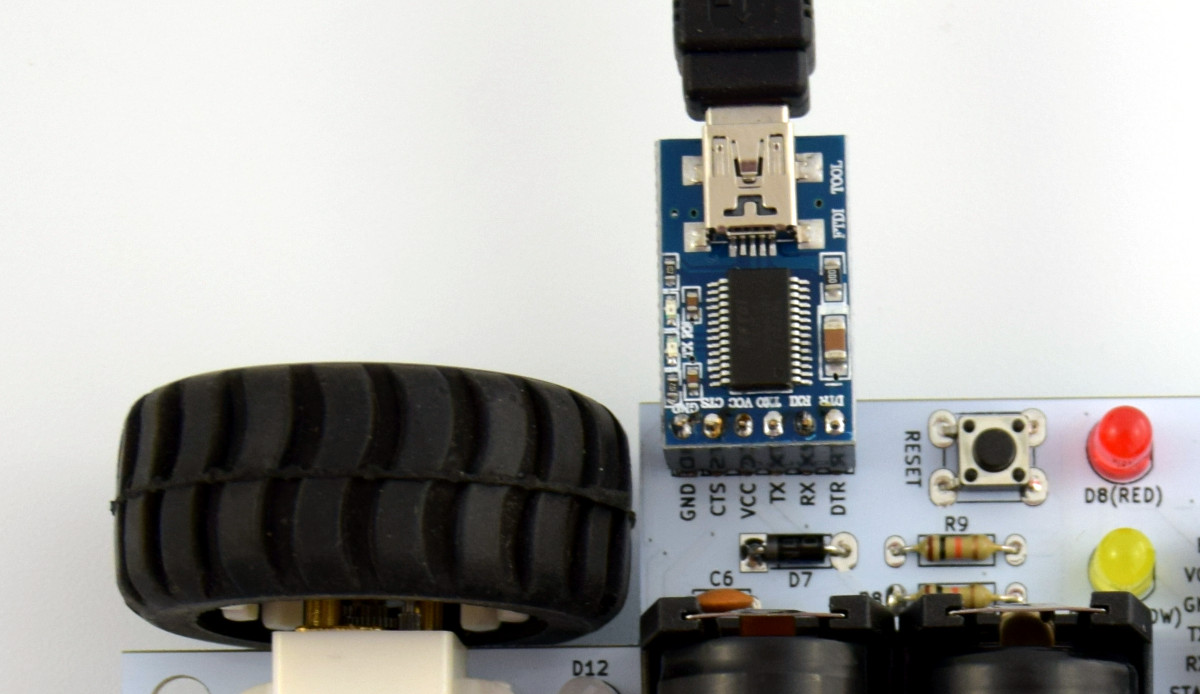
Para transferir los programas entre el ordenador y Compluino 03 utilizamos un adaptador FTDI que se incluye con el kit del robot. Este adpatador se conecta mediante un cable USB – Mini USB entre el ordenador y el conector USB2Serial del Compluino 03. No es necesario instalar ningún driver adicional para usar este adaptador, ya que está soportado de forma nativa por el IDE de Arduino.
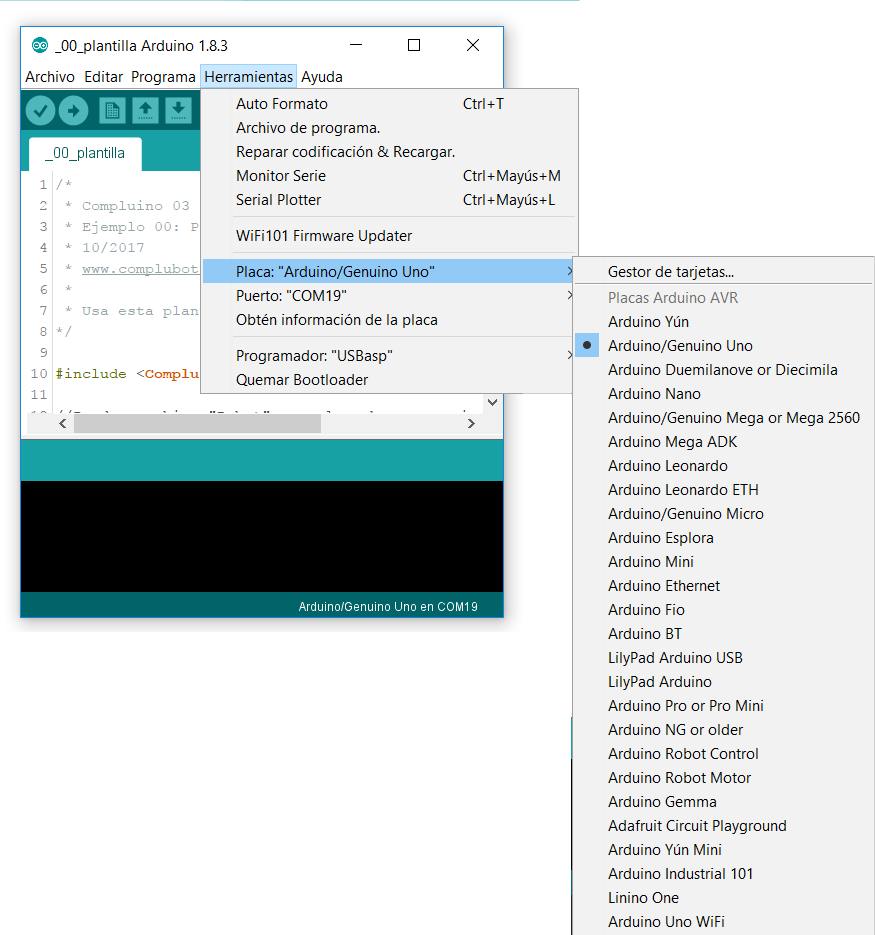
Una vez conectado así el robot con el ordenador, debemos ir al menú textual de Herramientas del IDE de Arduino y seleccionar el COM (puerto serie virtual). Si nos aparece más de uno posible, probar primero con el de mayor número. Un detalle importante a tener en cuenta es que Compluino 03 se comporta como una placa Arduino UNO, así que tenemos que seleccionar este tipo de dispositivo dentro del menu textual de Herramientas del IDE de Arduino.
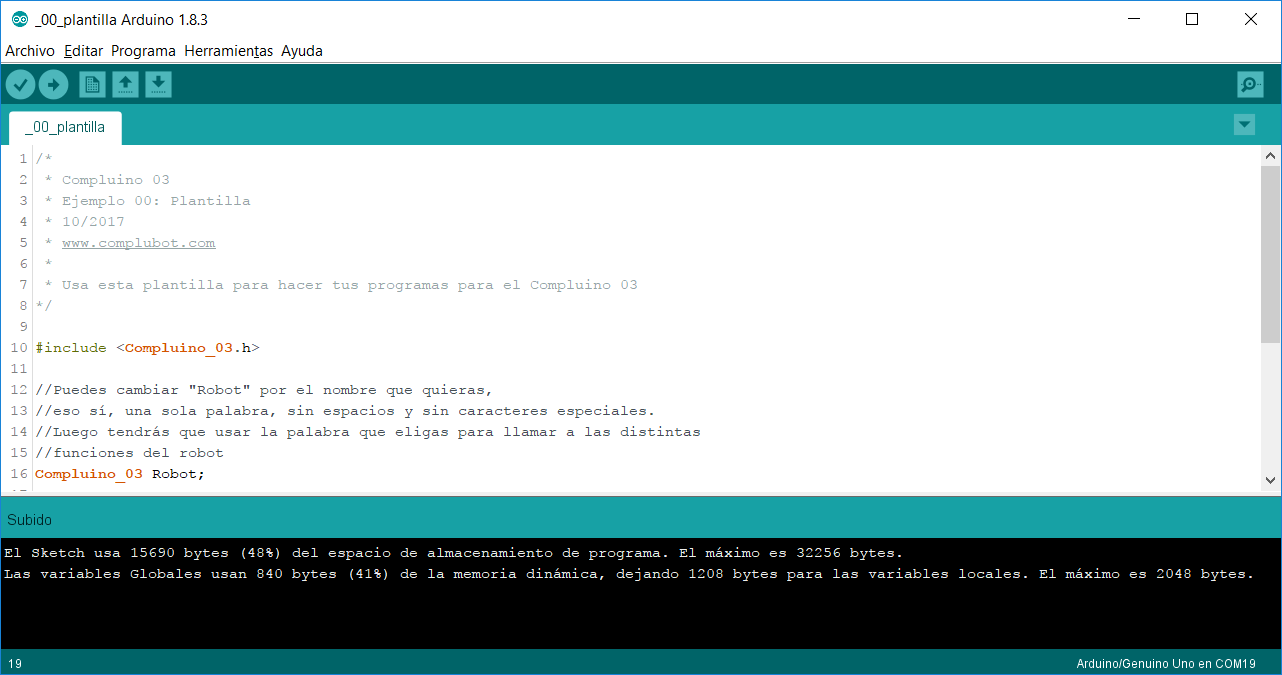
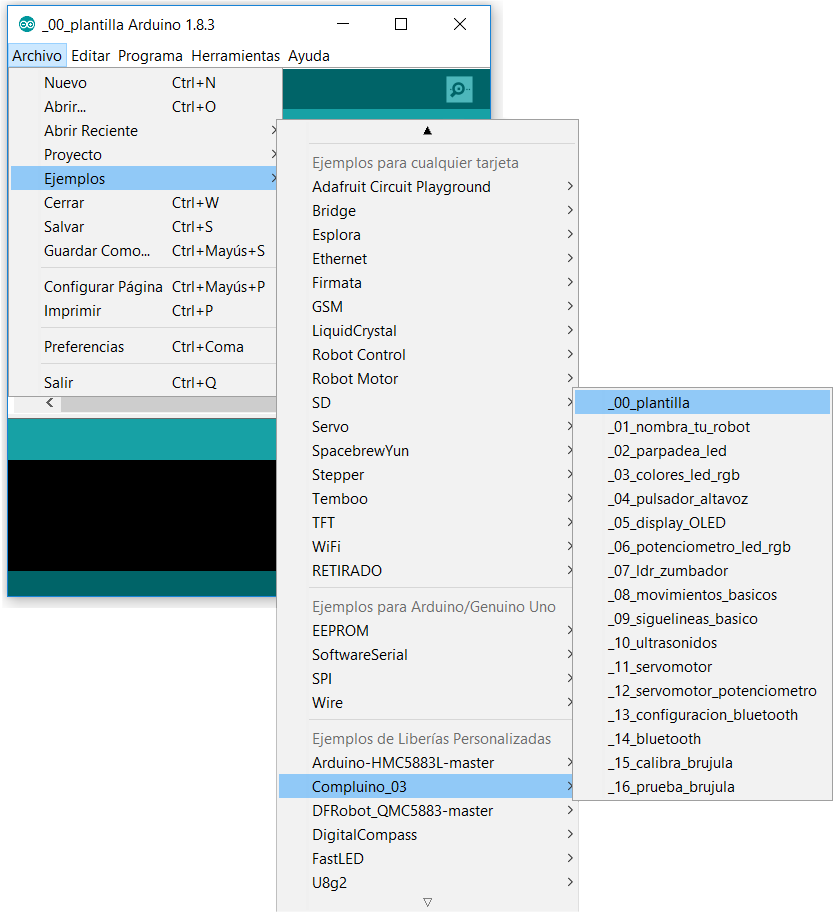
La librería Compluino 03 incluye algunos ejemplos que nos pueden servir de gran utilidad para dar los primeros pasos con nuestros robot. Para acceder a ellos tendremos que ir al menú textual Archivo y buscar la categoría Ejemplos. Desde ahí podemos abrir el primer ejemplo que nos encontramos _00_plantilla dentro de la sección de librerías personalizadas del Compluino 03, como se muestra en la siguiente imagen.
En sí mismo este ejemplo es un «programa vacío» que se limita a configurar e inicializar nuestro robot. Este programa puede ser un buen punto de partida para hacer los nuestros, pero en este momento inicial nos servirá para comprobar que todo está funcionando correctamente.
/*
* Compluino 03
* Ejemplo 00: Plantilla
* 10/2017
* www.complubot.com
*
* Usa esta plantilla para hacer tus programas para el Compluino 03
*/
#include
//Puedes cambiar "Robot" por el nombre que quieras,
//eso sí, una sola palabra, sin espacios y sin caracteres especiales.
//Luego tendrás que usar la palabra que eligas para llamar a las distintas
//funciones del robot
Compluino_03 Robot;
//Función de inicialización, se ejecuta una sola vez
void setup()
{
Robot.inicia();
}
//Programa principal, se ejecuta de forma repetida
void loop()
{
//Aquí es donde tienes que poner tu programa
}
Ahora llega el momento de la verdad, con el robot conectado, el tipo de tarjeta adecuado (Arduino UNO) y el puerto seleccionado correctamente, vamos a proceder a «subir» el programa de nuestro ordenador al robot, para ello solo hay que pulsar el segundo botón circular, el de la flecha hacia la derecha. Pasados unos segundos (o minutos, dependiendo de lo rápido que sea tu ordenador), se mostrará un mensaje como el siguiente en la parte inferior del IDE de Arduino.