

Descripción de la actividad
Programación del Robot UNO para que realice la actividad de sumo.
- Crumble Robot UNO
- Un portapilas de 3xAA (R6), preferiblemente con interruptor
Programa
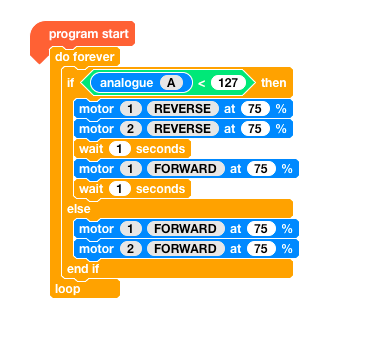
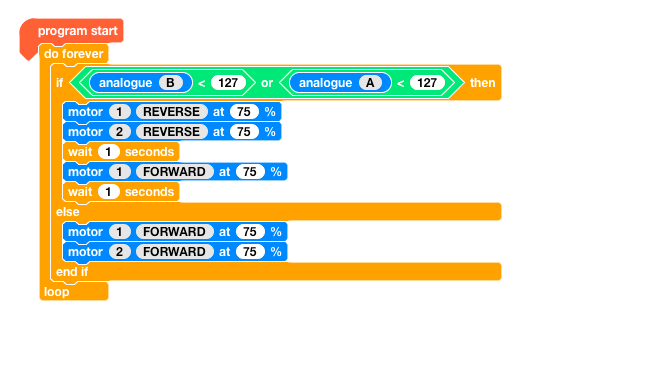
Con el siguiente programa haremos que el Robot UNO realice la actividad de sumo.
Hay que recordar cómo tomamos los valores en » TOMA DE VALORES CON UNO O MÁS SENSORES DE INFRARROJOS «
Ya configurados los valores que tomarán los sensores en blanco y negro, cliquearemos en la sección «Control» del entorno de programación de Crumble y seleccionaremos la sentencia [ if then else end if ].
Dentro del condicional, utilizaremos un operador lógico [ menor que ] para colocar, a un lado, el sensor analógico y al otro, el valor medio. Como expilcamos en el video nombrado anteriormente.
Como nuestro tablero es de color negro con borde blanco, el robot tiene que reconocer el blanco para no salirse del tablero.
Usaremos la parte «if» del condicional para que el motor retroceda durante un segundo y gire durante otro segundo. Después, el robot seguiría su camino hasta volver a leer valores de color blanco.
En la parte «else» del condicional, simplemente haremos que se desplace en línea recta.
Como nuestro robot tiene dos sensores analógicos, podemos añadirlos a nuestro programa. Para ello utilizaremos una sentencia booleana «OR» que encontraremos en la sección «Operators» de nuestro entorno de programación, la cual nos permitirá accionar la parada de motores si cualquiera de los dos sensores percibe el negro.
El resultado se muestra en la imagen del programa.
Ejercicio RU



