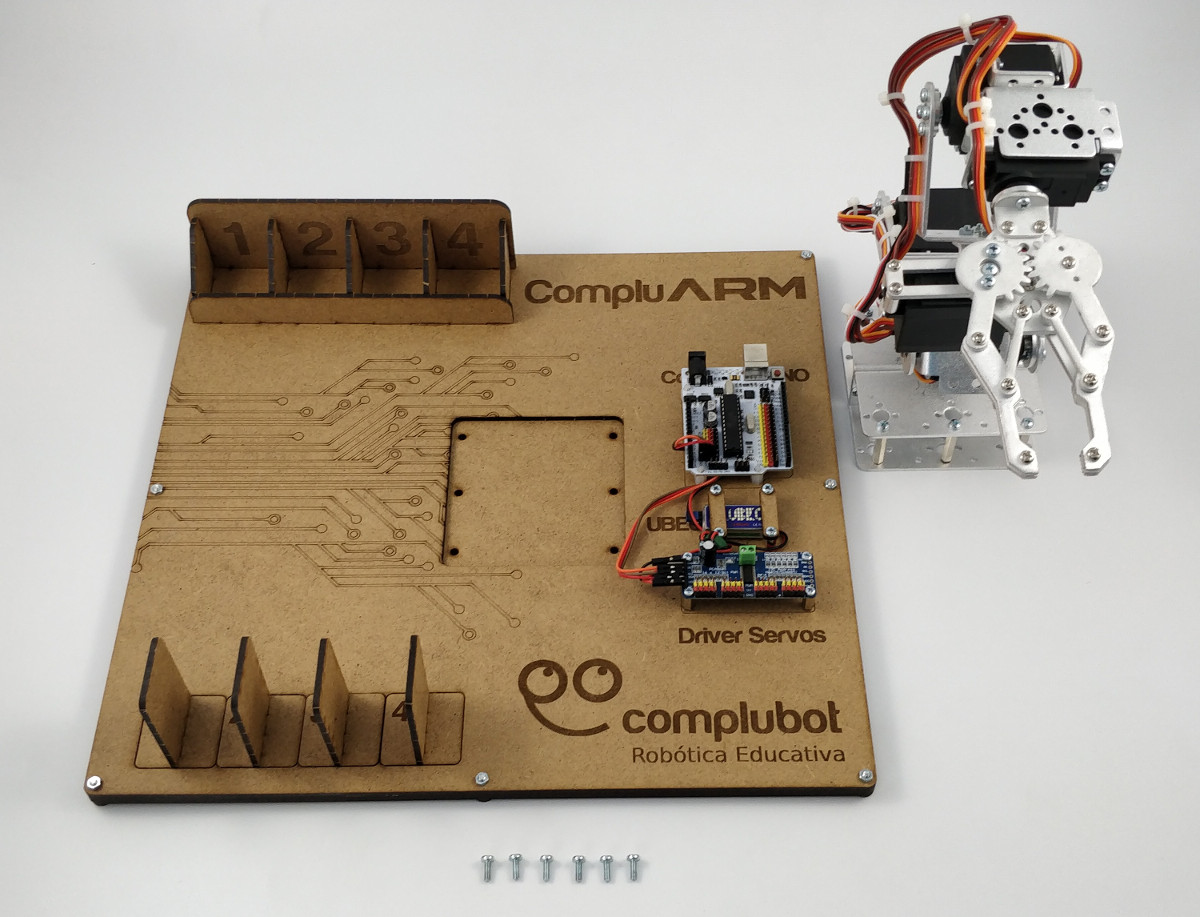
En esta parte del montaje de CompluARM, vamos a integrar y terminar de conectar todas las piezas de nuestro brazo robótico. Para ello necesitamos el brazo, la base, algunos tornillos y bridas.
Paso 1 – Sujetar el cableado
Materiales:
- bridas incluidas en el kit
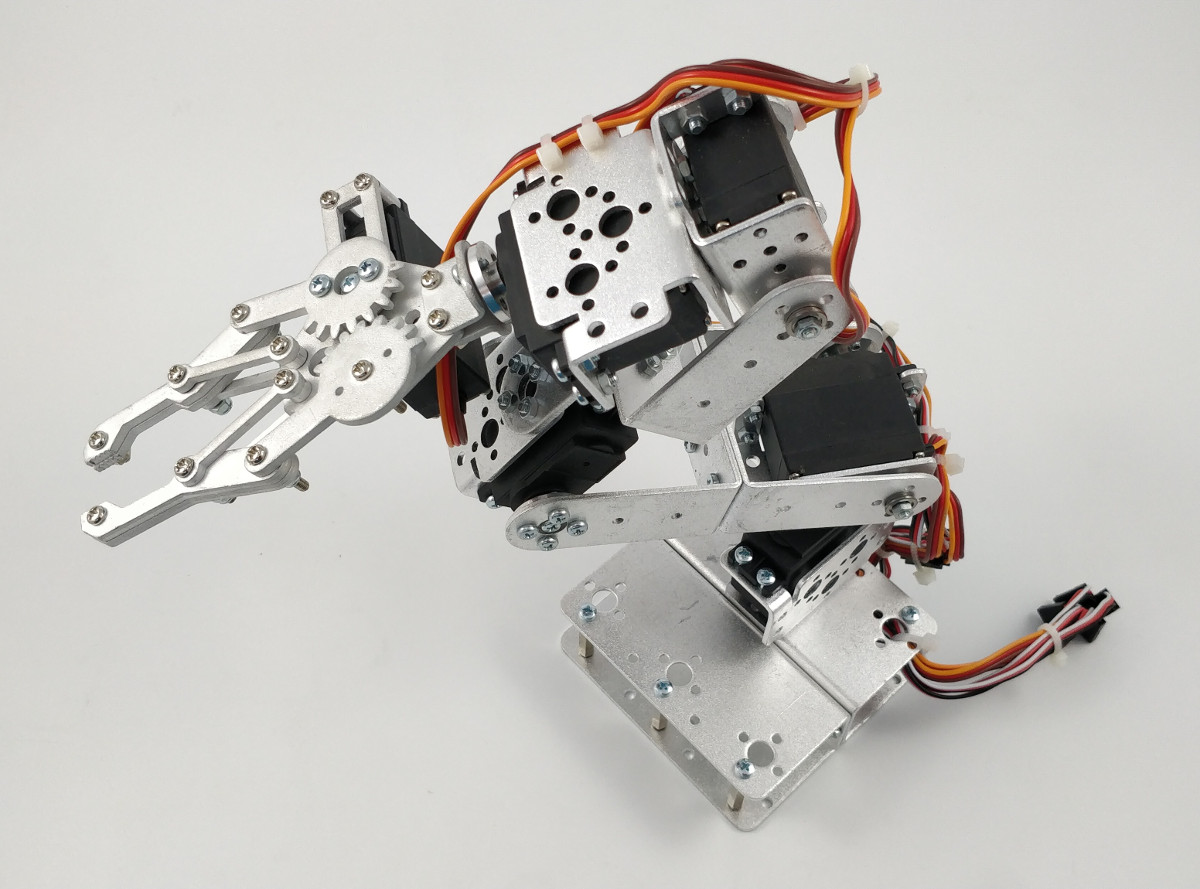
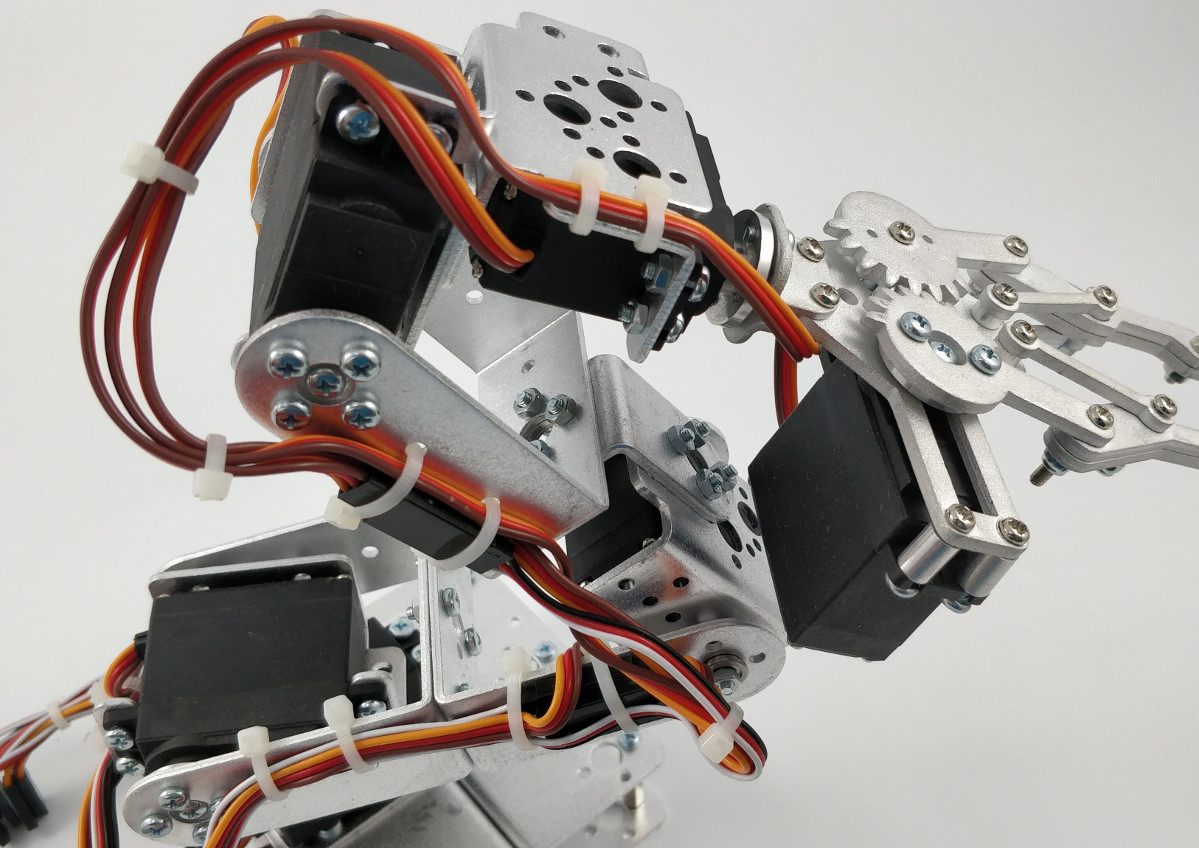
Para sujetar y ordenar el cableado del brazo vamos a utilizar las bridas que vienen en el kit, con ellas sujetaremos los cables a la estructura en los agujeros libres de los herrajes. Los cables deben poder permitir el movimiento del brazo y no quedar muy tirantes. A los cuatro servos mas alejados de la base les tendremos que poner los extensores de cable que vienen con el kit.
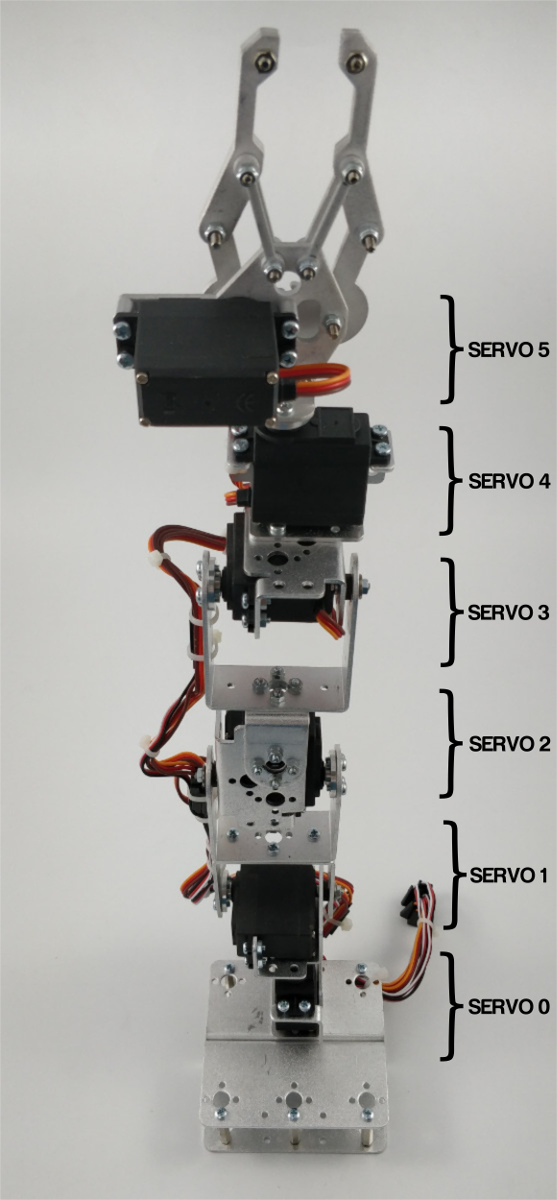
Para identificar cada uno de los servos de nuestro robot vamos a numerarlos desde el servo de la base hasta el servo de la pinza. Empezaremos por el cero para hacerlos coincidir con el controlador de servos.
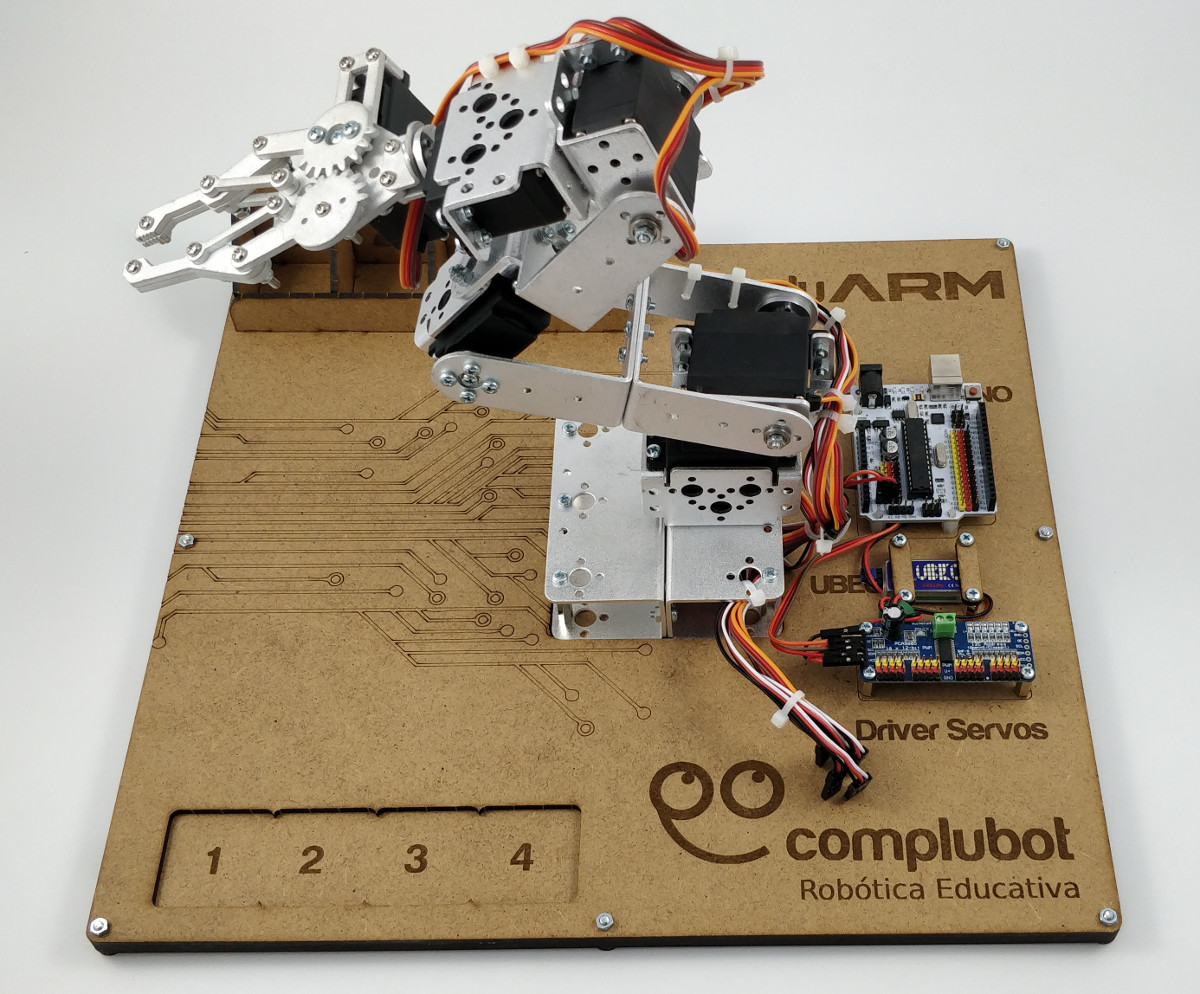
Paso 2 – Montamos el brazo en la base
Materiales:
- brazo CompluARM
- base de trabajo
- 6 tornillos M3 x 8 mm
Unimos el brazo a la base con los tornillos de M3 x 8mm. Asegurate de que el brazo se encuentra en la posición correcta y que puede desplazarse por la base de trabajo.
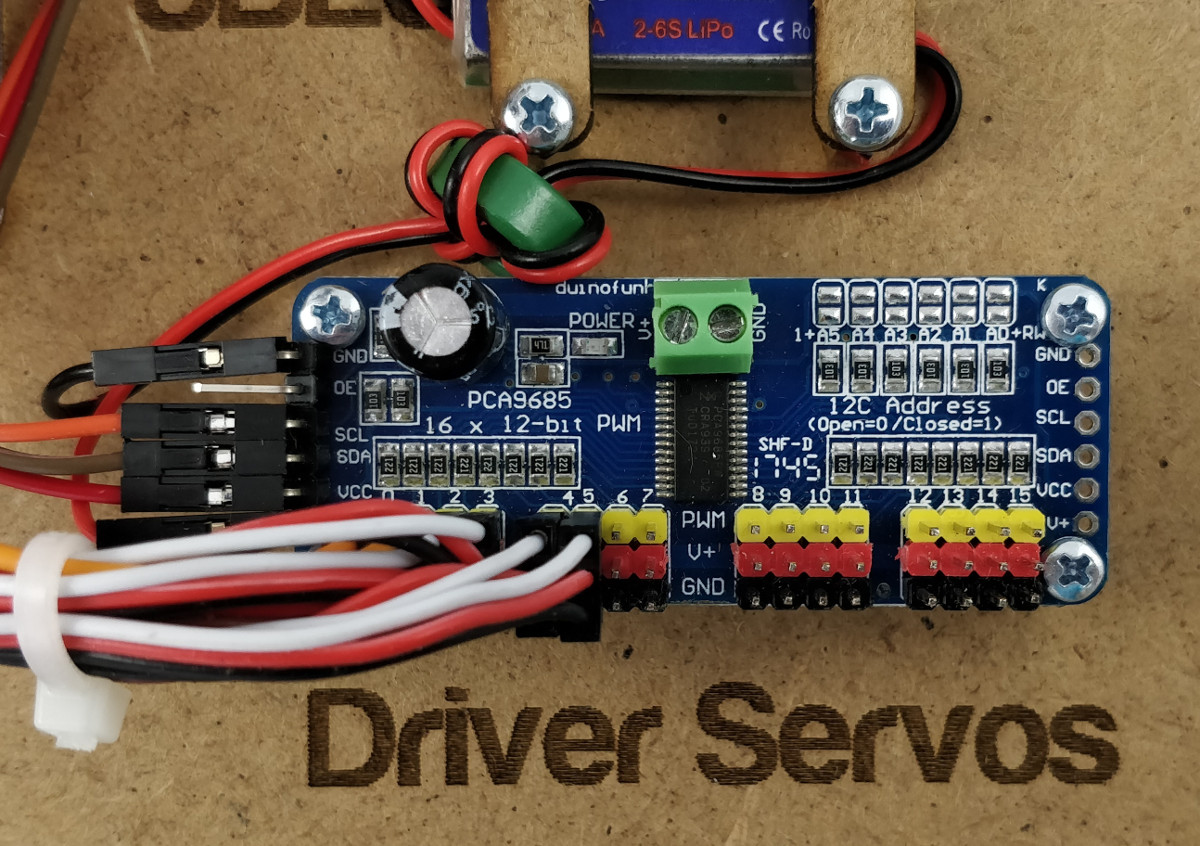
Paso 3 – Conectamos el controlador de servos
Materiales:
- base con el brazo montado
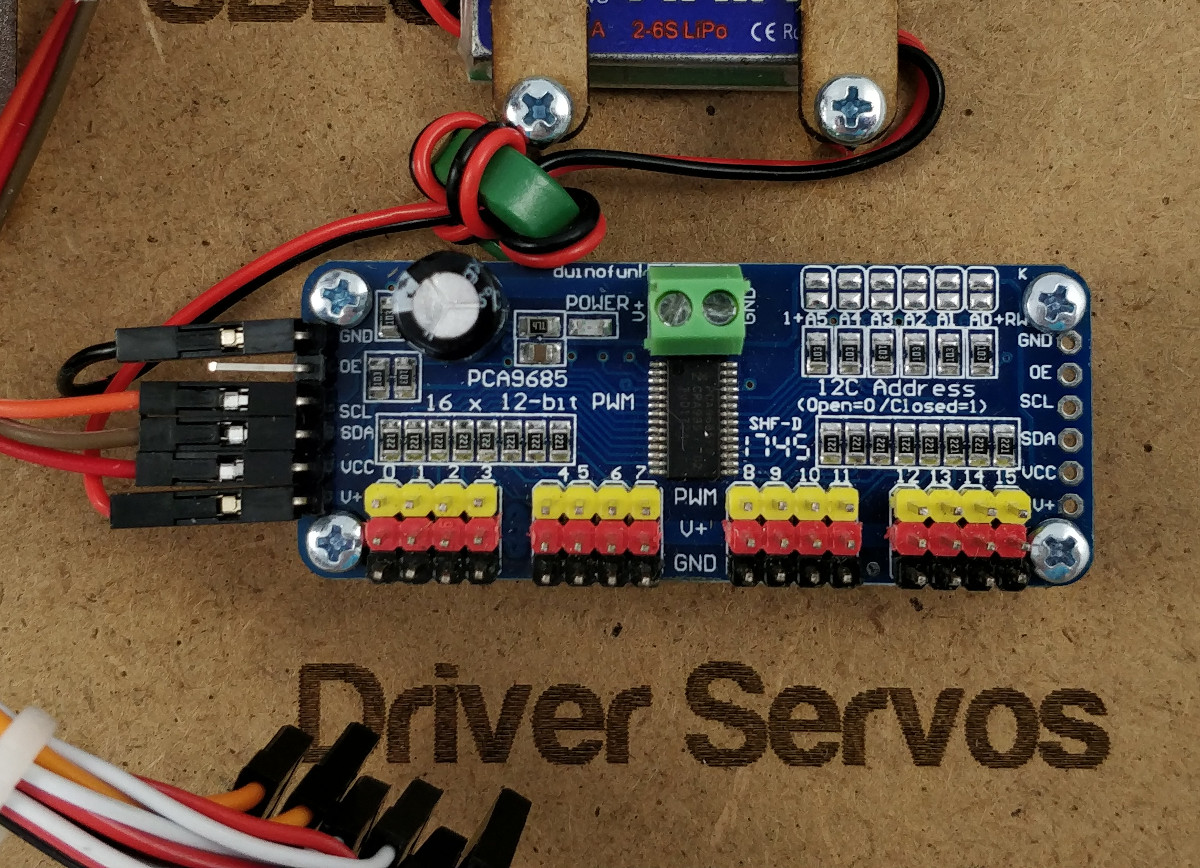
Conectamos los cables de manera que el nuemero de servo coincida con el numero en el conector del driver de servos.