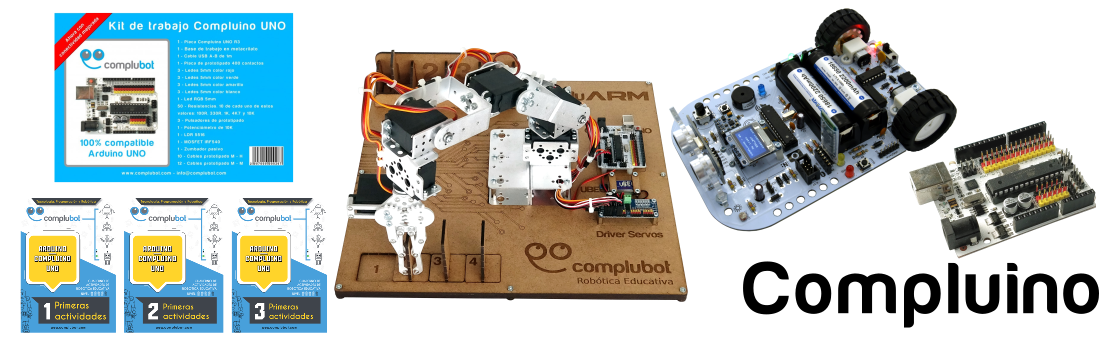
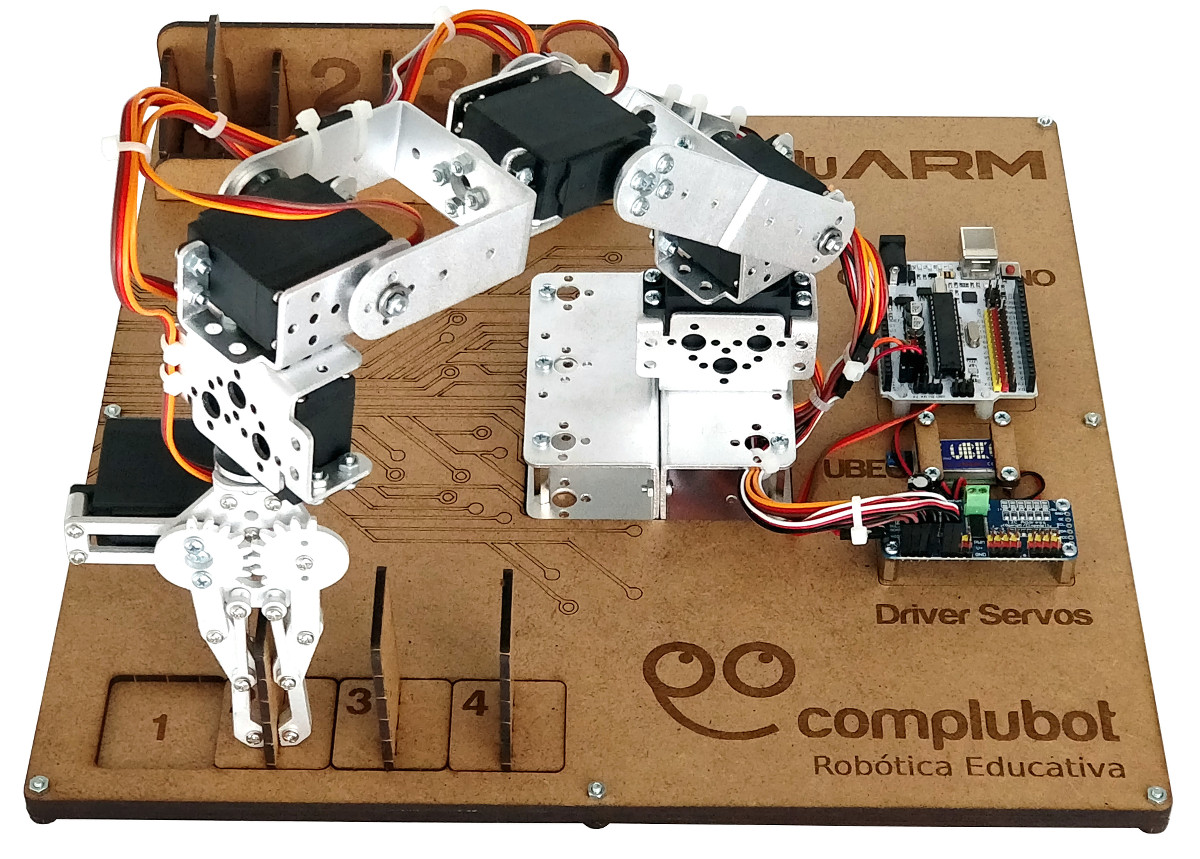
CompluARM es un brazo robótico educativo, basado en compluino UNO y 100% compatible con Arduino. CompluARM se suministra en kit para montar constituyendo así una excelente manera de trabajar los tres aspectos fundamentales: mecánica, electrónica y programación.
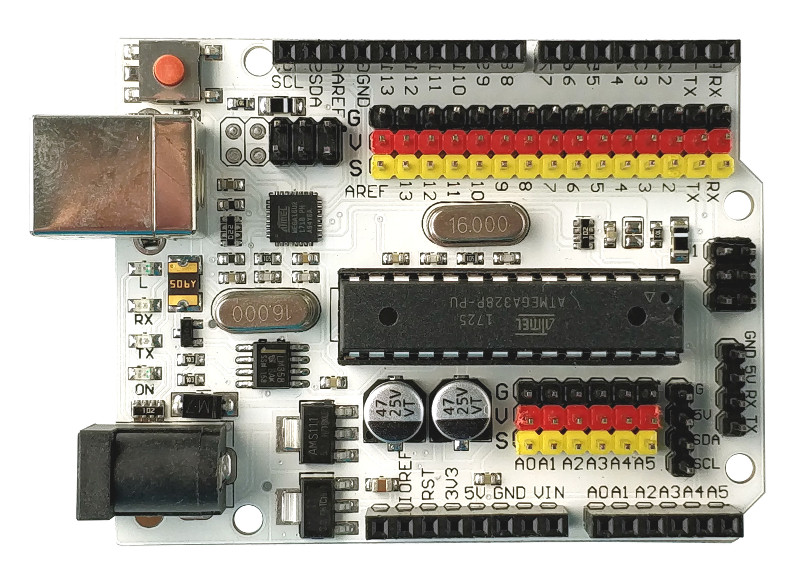
El controlador principal del CompluARM es nuestra placa Compluino UNO, una versión mejorada de la placa Arduino original, 100% compatible y con un sistema de conexión con múltiples pines de alimentación que simplifica las conexiones de las entradas/salidas digitales, de las entradas analógicas, de un módulo Bluetooth y del bus I2C.
Controlar servos con Arduino puede parecer sencillo si no somos muy exigentes con el resultado. Por desgracia la librería de control de servos está afectada por un fenómeno conocido como «Jitter». Esto significa que la señal de control que genera una placa Arduino con esta librería tiene una inestabilidad temporal, lo que se traduce en una variación en el ancho del pulso de control con la correspondiente vibración en el eje de salida del servo. Cuando trabajamos con sistemas con servos acoplados, como el CompluARM o cualquier otro sistema mecánico similar, el efecto de estas vibraciones se acumula y multiplica produciendo en el extremo final del mecanismo un temblor inadmisible.
El origen del problema radica en las múltiples interrupciones que se producen en los programas realizados con Arduino, estas interrupciones están generadas por las funciones temporales (millis y micros), por las comunicaciones serie y otros servicios del propio core de Arduino.
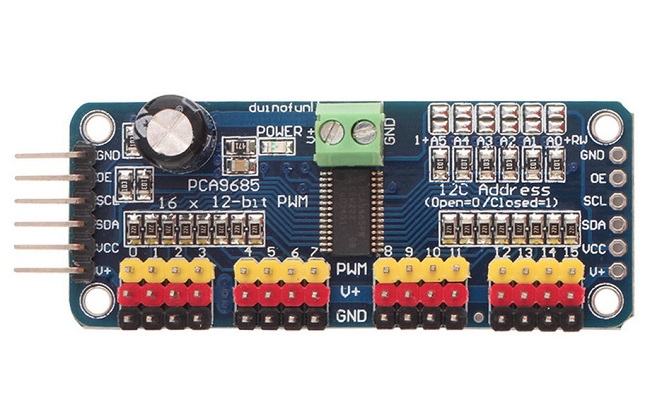
Para solucionar este problema en el CompluARM hemos incluido un módulo con un controlador externo de señales PWM (el PCA9685), con el que podemos controlar hasta 16 servos de forma independiente. Este módulo se comunica mediante un bus I2C, de esta manera solo usaremos dos pines de la controladora Compluino / Arduino del CompluARM, quednaod el resto de los pines disponibles para otras aplicaciones: pulsadores de control, sensores de fuerza, módulo de visión…
De forma resumida estas son las principales características del CompluARM:
- Brazo robótico con seis grados de libertad (6DOF)
- Manipulador con pinza de agarre
- Estructura metálica
- Tornillería de alta calidad
- Servos de alto par mecánico, con tren de engaranajes metálicos y casquillo metálico de salida
- Controladora Compluino UNO
- Controladora de 16 canales PWM con bus I2C
- Regulador UBEC para la alimentación de servos
- Base de trabajo con actividades
- Alimentador de pared de 7,5V/2A