Antes de empezar a montar nada
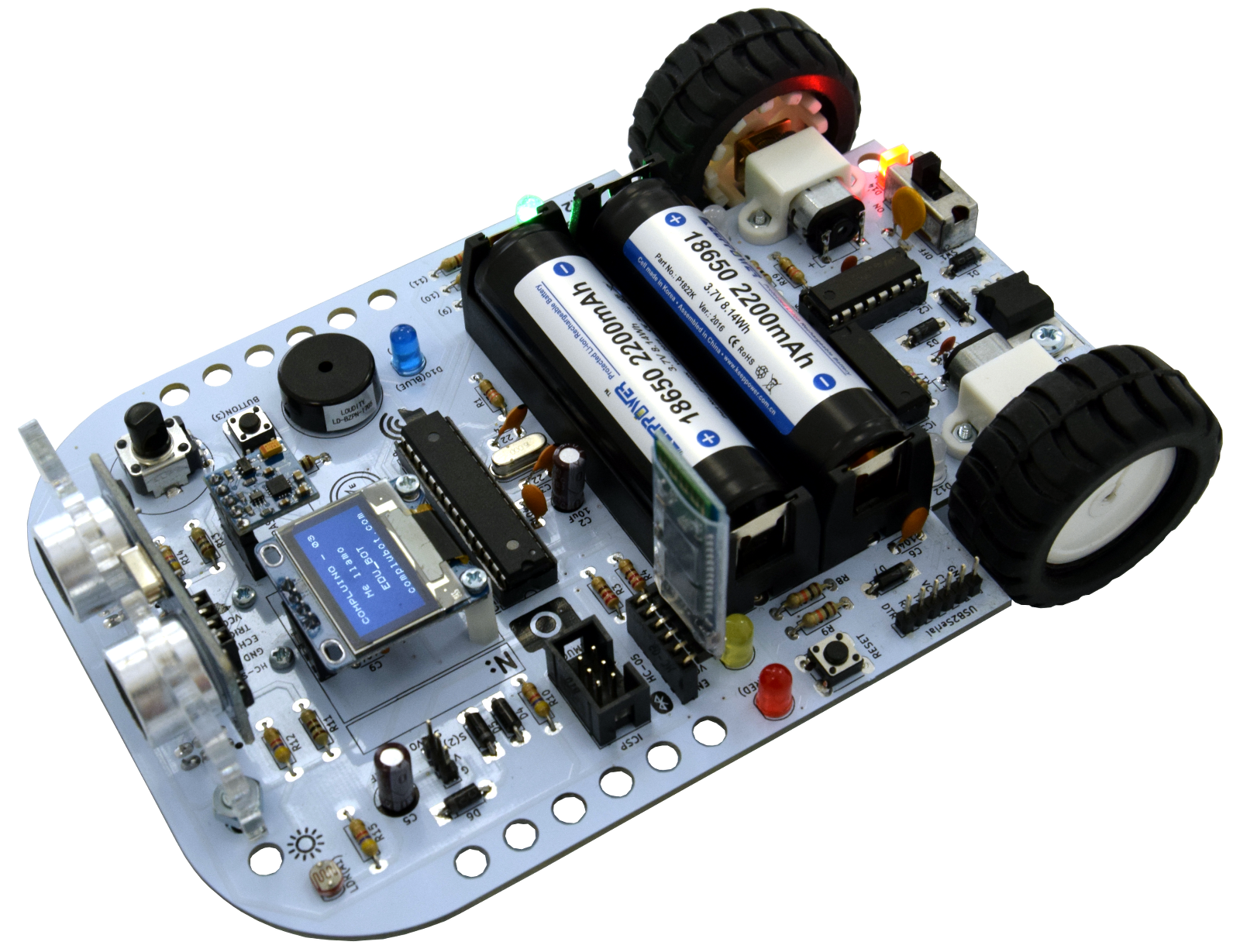
Montar un robot como Compluino 03 es una enriquecedora experiencia educativa que te permitirá entrar en el mundo de la robótica de la mano de la electrónica, mecánica y programación.
Importante: para montar este kit se requiere de unos conocimientos técnicos mínimos y de habilidades relacionadas con el manejo de ciertas herramientas. Si no estás seguro de poder hacerlo, pide ayuda. El correcto funcionamiento del robot depende de que seamos capaces de realizar todas estas labores con precisión. Este kit no es un juguete, es un material educativo que no está indicado para menores de 13 o 14 años (dependiendo de sus habilidades y conocimientos) y aún así, siempre bajo la supervisión de un adulto.
Lee con detalle todas las instrucciones de montaje antes de proceder a la soldadura de los distintos componentes. Si cometes errores en el montaje, el robot no funcionará, e incluso puede resultar dañado. Este tipo de daños no están cubiertos por la garantía ya que se trata de un kit para montar y es responsabilidad del usuario realizar este proceso con corrección.
Herramientas
Para realizar el montaje de este robot vamos a necesitar algunas herramientas básicas:
 |
 |
 |
 |
 |
- Alicate de corte pequeño
- Alicate de puntas planas
- Destornillador de estrella con punta PH1
- Soladador de 30-40W (mejor si tiene control de temperatura)
- Estaño de 1mm para soldar (importante, que sea de buena calidad)

Aunque no es imprescindible, te resultará de gran utilidad disponer de un pequeño multímetro.
Se trata de un instrumento de medida con el que puedes comprobar la correcta continuidad de las conexiones y medir voltajes e intensidades de corriente. Uno profesional puede ser realmente costoso, pero hay algunos modelos de multímetros para aficionados con una excelente relación calidad precio.
Contenido del kit de Compluino 03
En su versión para montar, el kit de Compluino 03 incluye los siguientes componentes:
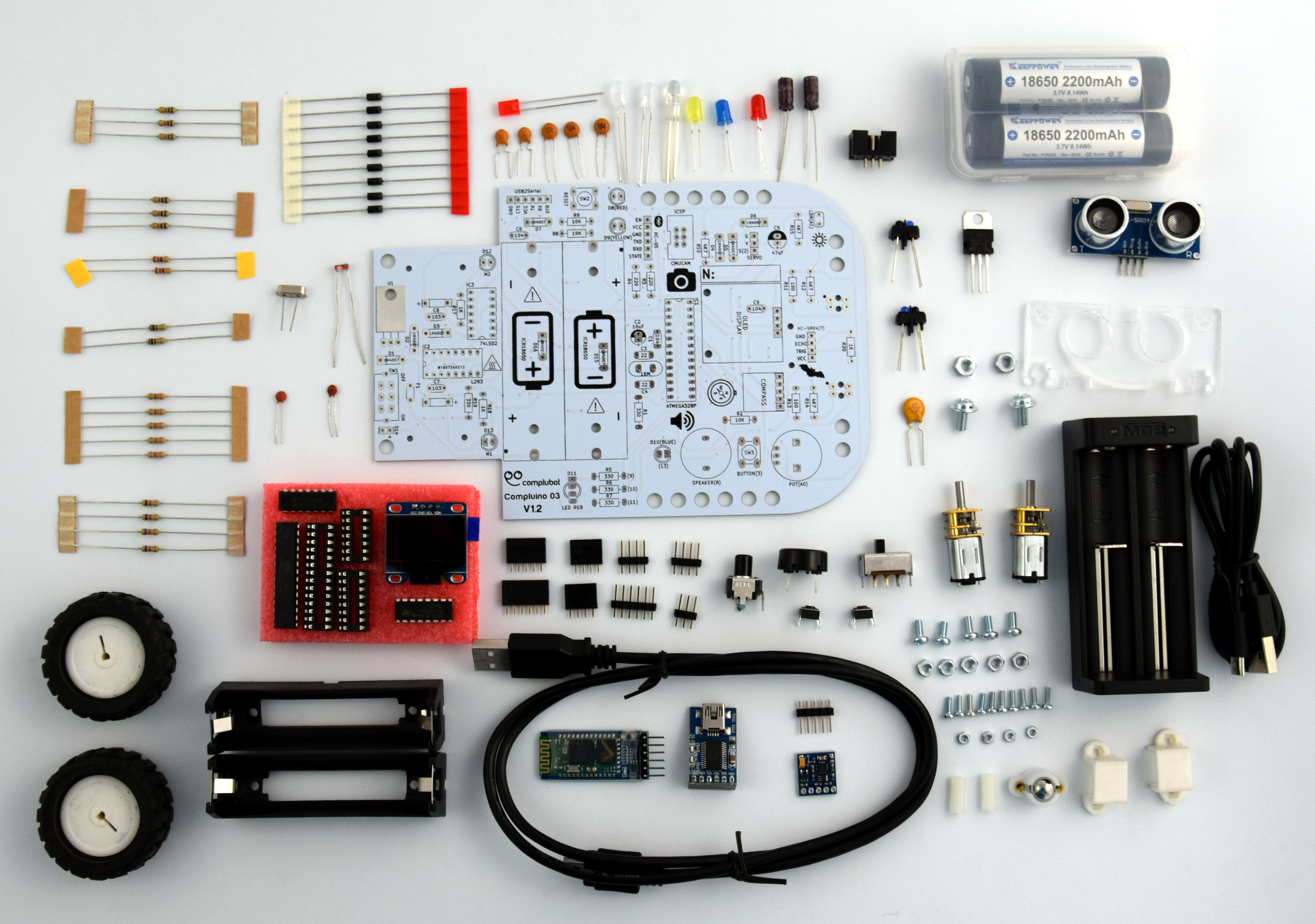
- Placa de circuito impreso Compluino 03
- Resistencias: 100 (2), 220 (2), 330 (5), 1K (3), 4K7 (4) y 10K (3)
- Condensadores cerámicos: 22pF (2), 10nF (2), 100nF (3)
- Condensadores electrolíticos: 10uF/35v (1) y 47uF/35v (1)
- Diodos: 1N4007 (9)
- Ledes 5mm: Rojo (1), Amarillo (1), Azul (1), RGB (1), Bicolor (2)
- Led rectangular: Rojo (1)
- LDR: 5516 (1)
- Zócalos: 2×7 (1), 2×8 (1), 2×14 (1)
- Tiras de pines macho: 1 x 3 (1), 1 x 4 (2) y 1 x 6 (1)
- Tiras de pines Hembra: 1 x 4 (2), 1 x 5 (1) y 1 x 6 (1)
- Interruptor de dos posiciones y dos circuitos (1)
- Pulsador NO (2)
- Potenciómetro de 10K (1)
- Altavoz piezo eléctrico (1)
- Regulador 7805 (1)
- Sensor reflexivo de IR (2)
- Oscilador de cristal de 16MHz (1)
- Polifusible (1)
- Microcontrolador ATmega328P (1)
- Circuito lógico 74HC02 o 74LS02 (1)
- Controlador de motores L293D (1)
- Portapilas MR18650 (2)
- Cargador de baterías XTAR MC2 (1)
- Cable USB Mini USB 1m (1)
- Motores: 6V @ 38rpm (2)
- Soportes para motores (2)
- Ruedas: ruedas de goma de 19 x 42mm (2), rueda loca (1)
- Baterías: Li-Ion 3,7V/2200mA/h con circuito de protección (2)
- Sensor de ultrasonidos HC-SR04 (1)
- Brújula HCM5883L (1)
- Módulo adaptador USB-Serie FTDI (1)
- Módulo Bluetooth HC-05 (1)
- Tornillería: Tornillo M2 x 6 (10), Tornillo M3 x 6 (5), Tornillo M4 x 8 con solapa (2), Tuerca M2 (4), Tuerca M3 (5) y Tuerca M4 (2)
- Separador de poliamida de M2 x 12 (2)
- Soporte para sensor ultrasónico, cortado por láser (1)
- Caja contenedora (1)
Vamos a comenzar el montaje soldando los distintos componentes en la placa de circuito impreso que hace de base del Compluino 03.
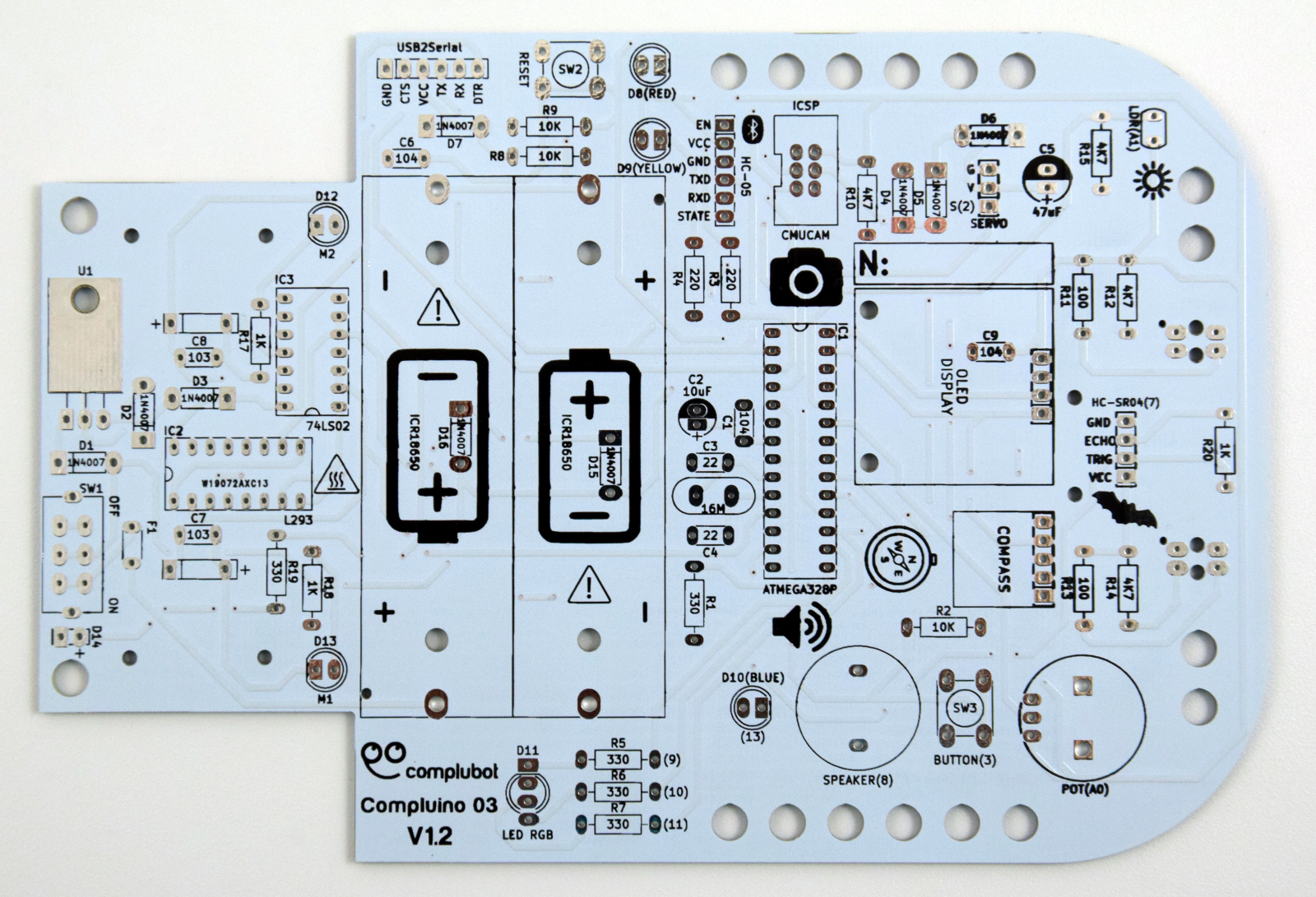
Para facilitar el proceso de soldadura vamos a seguir un orden en el montaje, comenzando por los elementos más bajos y siguiendo por orden creciente de tamaño. De esta manera simplificaremos la soldadura de los elementos al poder apoyar sobre la mesa el circuito impreso con la parte de las soldaduras mirando hacia el lado superior.

Una vez realizada la soldadura, cortamos el resto de terminal que queda por encima de la soldadura mediante un alicate de corte. Esto no es necesario con aquellos componentes que tienen los terminales cortos, como los conectores, zócalos o con los terminales del potenciómetro o del interruptor.
Paso 1 – Resistencias
Las resistencias carecen de polaridad y se distinguen por el valor óhmico (valor de la resistencia en ohmios) que se indica mediante bandas de colores. En la serigrafía de la placa de circuito impreso, se indica tanto la referencia del componente (RX) como su valor de forma numérica. En la siguiente lista se muestran las distintas resistencias, su valores y la combinación de colores que le corresponde.
- R1, R5, R6, R7 y R19: 330 (naranja, naranja y marrón)
- R2, R8, y R9: 10K (marrón, negro y naranja)
- R3 y R4: 220 (rojo, rojo y marrón)
- R10, R12, R14 y R15: 4K7 (amarillo, violeta y rojo)
- R11 y R13: 100 (marrón, negro y marrón)
- R17, R18 y R20: 1K (marrón, negro y rojo)
Así queda la placa de circuito impreso con las resistencias montadas.

Paso 2 – Diodos
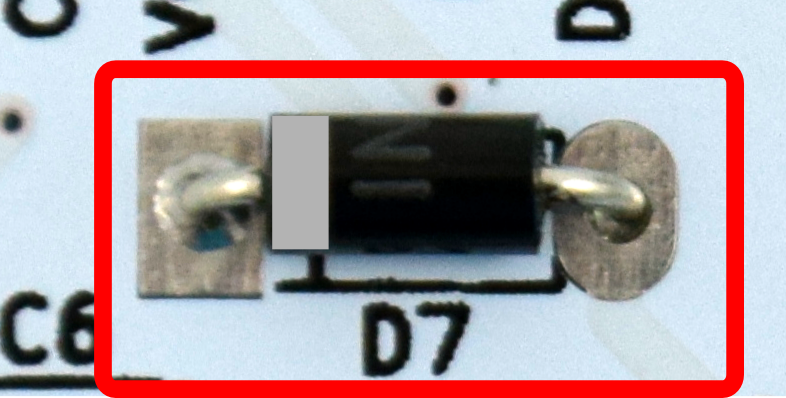
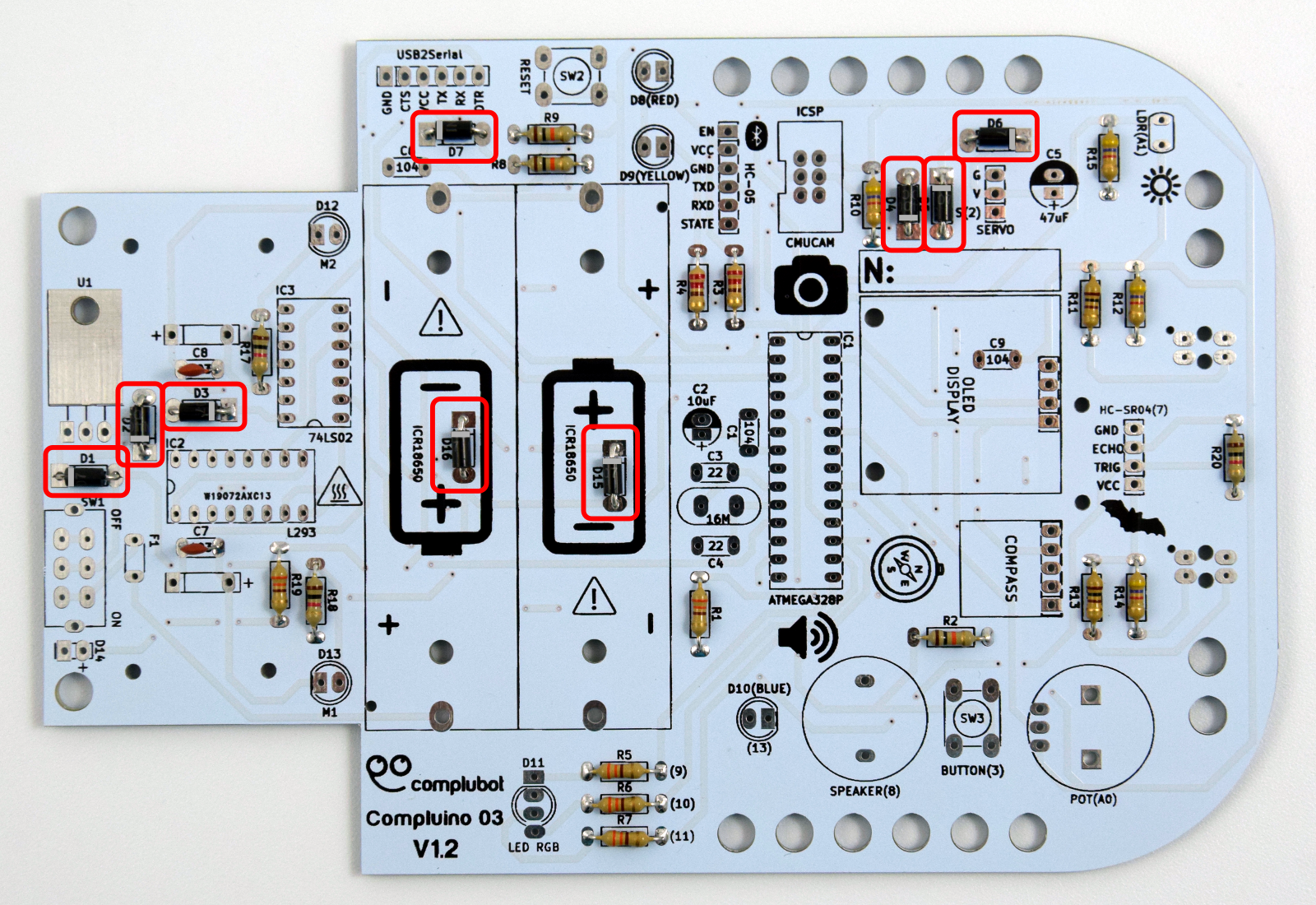
Compluino 03 usa 9 diodos de silicio del tipo 1N4007. Estos están señalizados con las referencias: D1, D2, D3, D4, D5, D6, D7, D15 y D16. Los diodos sí tienen polaridad, así que hay que prestar especial atención para colocar la línea de color claro del diodo, de forma coincidente con la línea que aparece en la serigrafía de cada uno de estos diodos. Esta además coincide con el pad con forma rectangular de los dos que se usan para soldar el diodo.
Así queda la placa con los diodos soldados (recuadrados en rojo).
Paso 3 – LDR, resistencia que varía con la luz
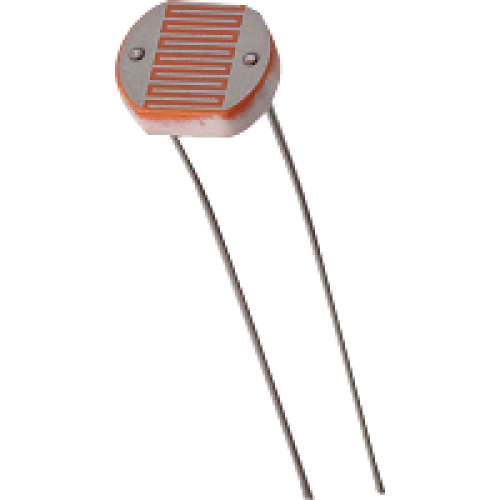
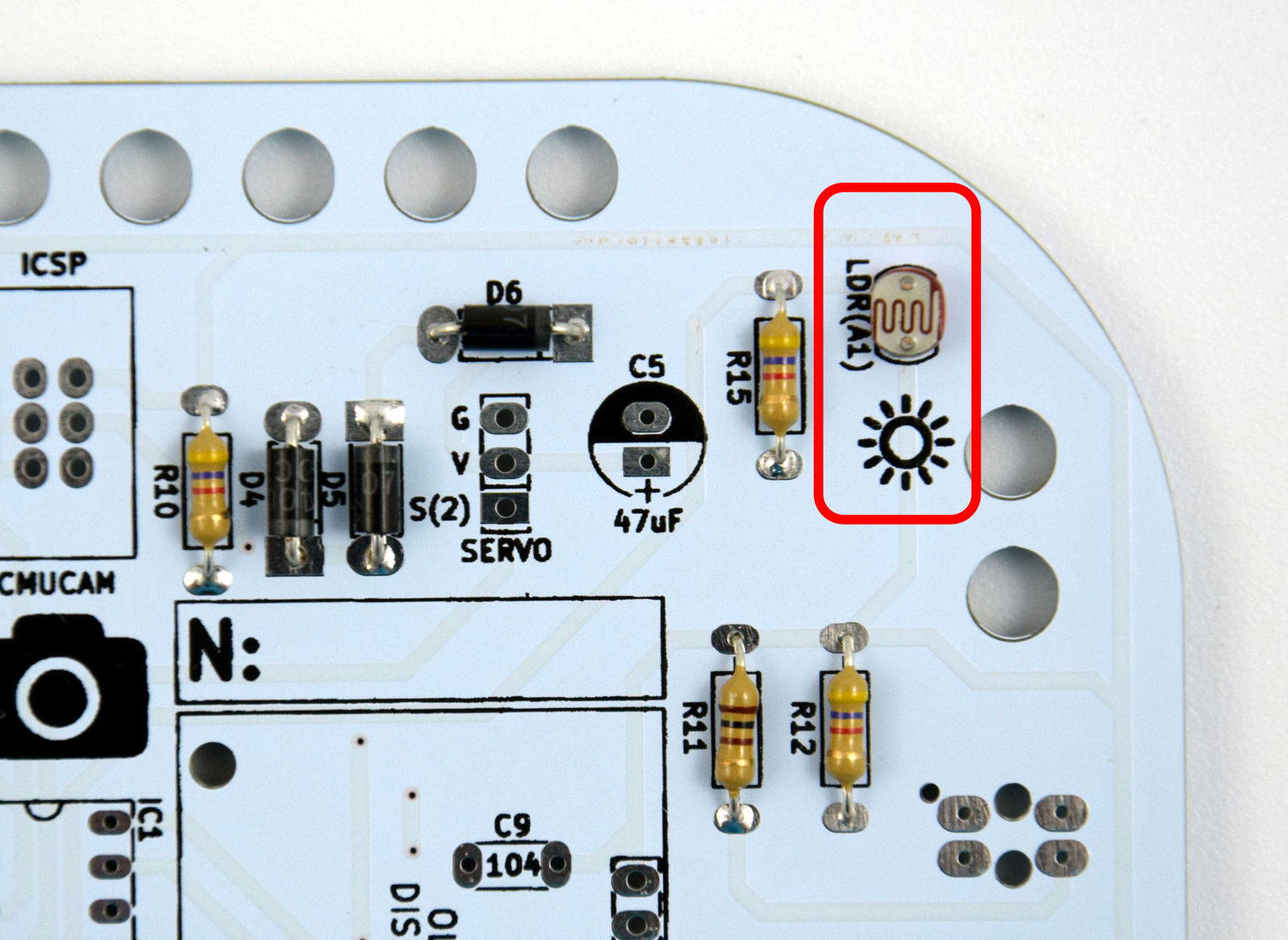
La LDR es un tipo de resistencia cuyo valor ohmico varía con la cantidad de luz que recibe. De tal manera que al aumentar la luz, la resistencia disminuye y al reducirse la luz, la resistencia aumenta. Esta propiedad convierte la LDR en un interesante sensor de luz.
La LDR carece de polaridad, así que solo tenemos que soldarla en el circuito del robot, tal y como se muestra en la siguiente imagen.
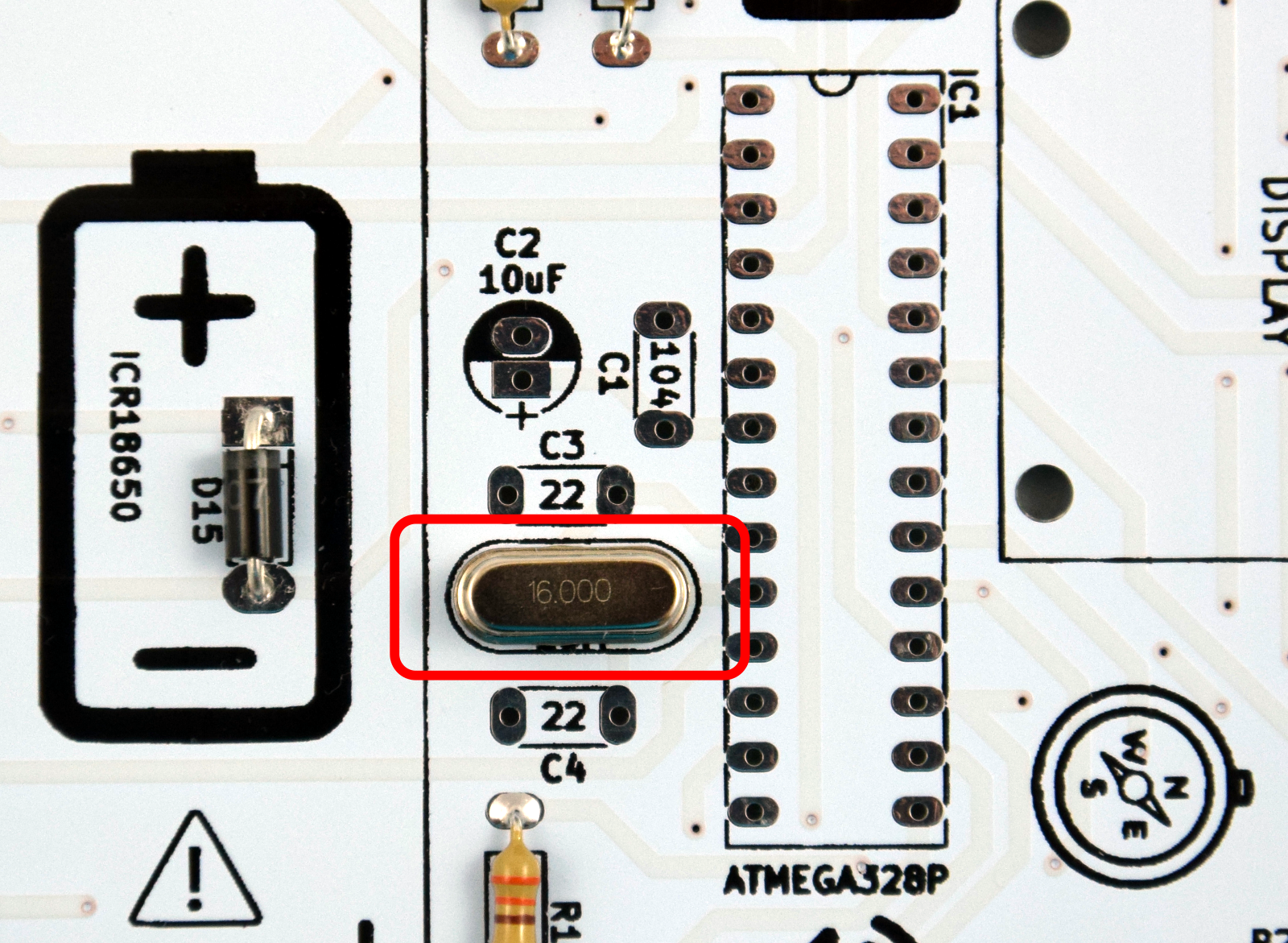
Paso 4 – Oscilador de cristal

En el centro de la placa de circuito impreso vamos a colocar el oscilador de cristal. Este componente electrónico es un resonador piezo eléctrico que oscila a una frecuencia de 16MHz. En nuestro montaje será el encargado de marcar el ritmo de funcionamiento del microcontrolador. Este componente no tiene polaridad, así que da igual en la orientación en la que se coloque. Si bien la lógica (y la estética) nos sugieren que lo pongamos de manera que su valor (16.000) se pueda leer sin tener que girar la placa, tal y como se muestra en la siguiente imagen.
Paso 5 – Condensadores de filtro para los motores

En Compluino 03 hay condensadores de distintos valores y tecnologías. En general todos ellos se usan para eliminar el ruido eléctrico en distintas partes del robot. Para filtrar el ruido eléctrico generado por los motores usamos dos condensadores cerámicos (C7 y C8) de 10nF de capacidad.
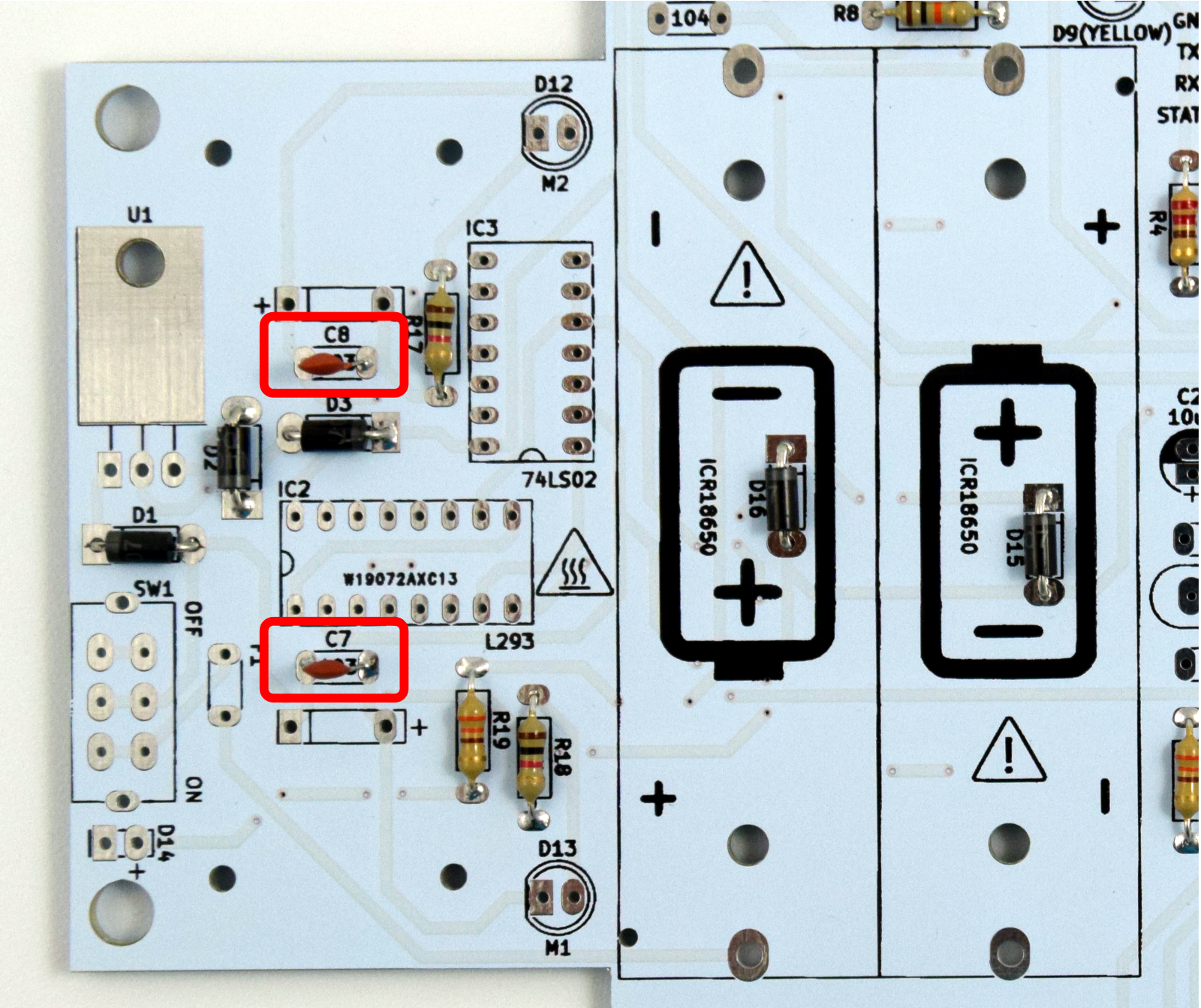
Estos condensadores suelen ser de color marron anaranjado y para este valor se identifican con la referencia 103 escrita en el cuerpo del condensador.
Este tipo de condensadores no tienen polaridad, así que podemos soldarlos sin prestar especial atención a su posición. En la imagen de la izquierda se muestra su colocación (recuadrados en rojo) en la zona próxima a los motores del robot.
Paso 6 – Pulsadores

Compluino 03 dispone de dos pulsadores: uno de reset y otro programable por el usuario. Para colocarlos en la placa de circuito impreso hay que conformar un poco los terminales, teniendo en cuenta que el de reset se coloca en horizontal (los terminales a la izquierda y a la derecha) y el de usuario en vertical (con los terminales arriba y abajo), tal y como se muestra en la siguiente imagen. Tras colocarlos se sueldan sus cuatro terminales.

Paso 7 – Zócalos
Los circuitos integrados de Compluino 03 no se sueldan directamente a la placa de circuito impreso. En vez de esto se colocan unos zócalos que nos permiten colocar estos componentes electrónicos e incluso sustituirlos en caso de avería, sin necesidad de tener que desoldar nada. Los zócalos son de tres medidas, en función del tamaño del circuito integrado al que está destinado:
- 2 x 14 pines -> ATmega328
- 2 x 8 pines -> L293D
- 2 x 7 pines -> 74HC02 (o 74LS02)
Los zócalos, al igual que los circuitos integrados, tienen una posición concreta que se señala con una muesca (o un punto) en uno de sus extremos. Al colocar los zócalos hay que tener en cuenta esta marca que hemos señalado con un círculo rojo en la siguiente imagen.

Paso 8 – Led rectangular
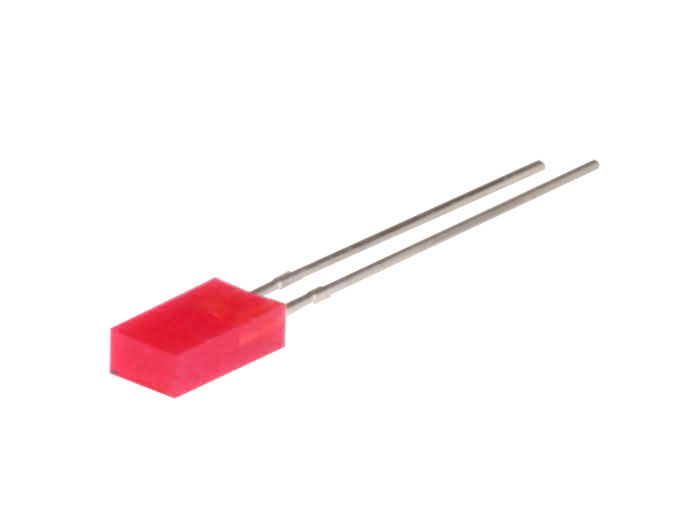
El led (diodo emisor de luz) es un componente optoelectrónico capaz de emitir luz visible de distintos colores. En el caso del led rectangular de nuestro robot, emite luz de color rojo. El led tiene polaridad y en el caso del formato rectángular la forma más sencilla de identificar la polaridad es localizando la patilla «más larga», que tendremos que colocar en el pad marcado con el signo «+» del D14 de la serigrafía del circuito impreso del robot.
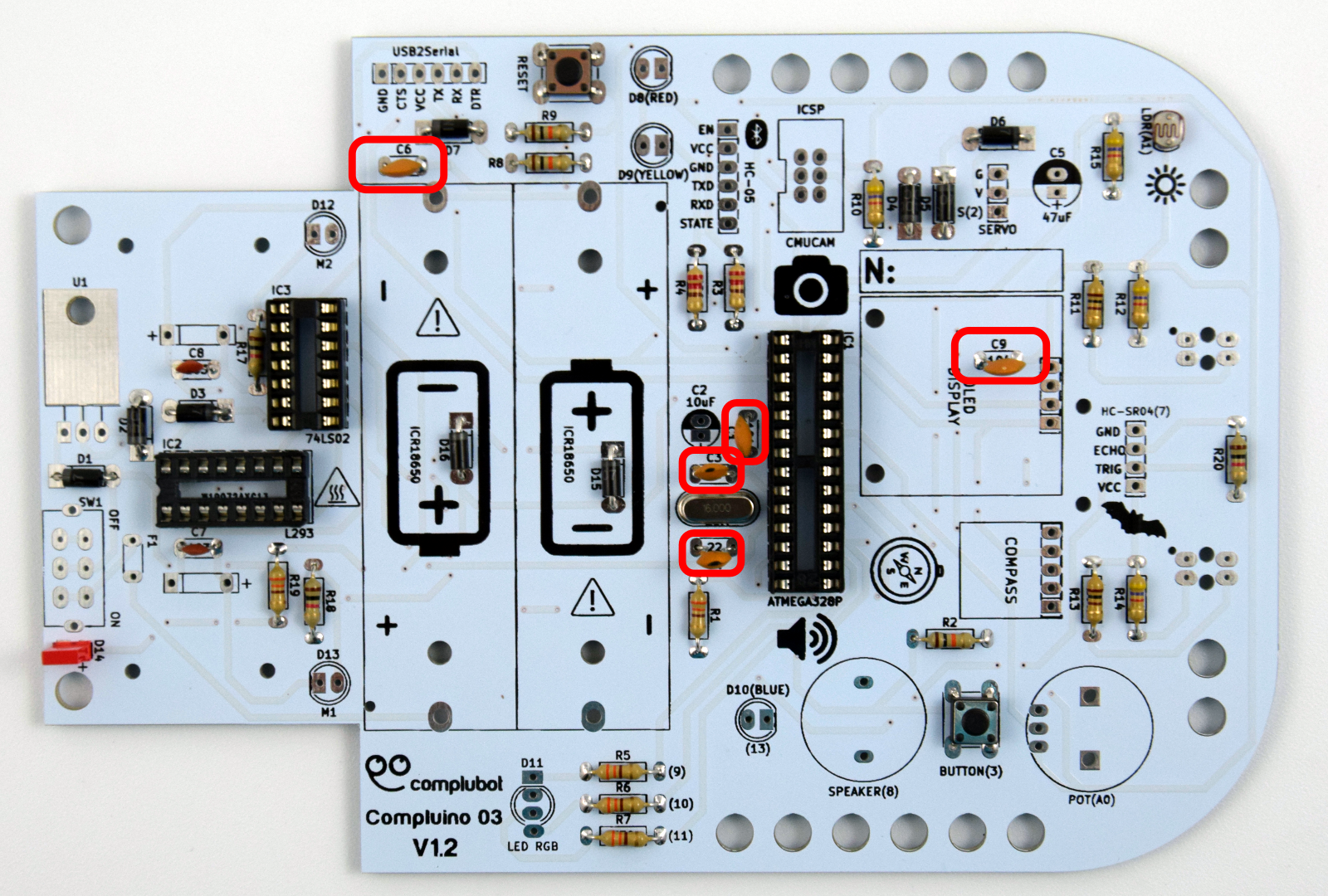
Paso 9 – Condensadores cerámicos
Vamos a montar el resto de los condensadores cerámicos del robot. En concreto, dos de 22pF (referencia 22) y tres de 100nF (referencia 104).
| Condensador de 22pF C3 y C4 |
 |
Condensador de 100nF C1, C6 y C9 |
Los condensadores de 22pF sirven para ayudar al oscilador de cristal a que funcione en su frecuencia de trabajo (16MHz). Por otra parte, los tres condensadores de 100nF tienen funciones bien distintas: C1 y C9 son condensadores de filtrado de alimentación, mientras que C6 convierte un cambio de nivel en la línea RST del conversor Serie-USB en un pulso de «Reset» que se aplica al microcontrolador del robot.
Este tipo de condensadores cerámicos no tienen polaridad, así que los puedes soldar en cualquier posición. Eso sí, siempre dentro de los contactos que se marcan en su serigrafía.
Paso 10 – Tiras de pines
En el kit de Compluino 03 podemos encontrar dos tipos de tiras de pines: macho (una de 3 pines, dos de 4 pines y una de 6 pines) y hembra (dos de 4 pines, una de 5 pines y una de 6 pines), que actúan como conectores.
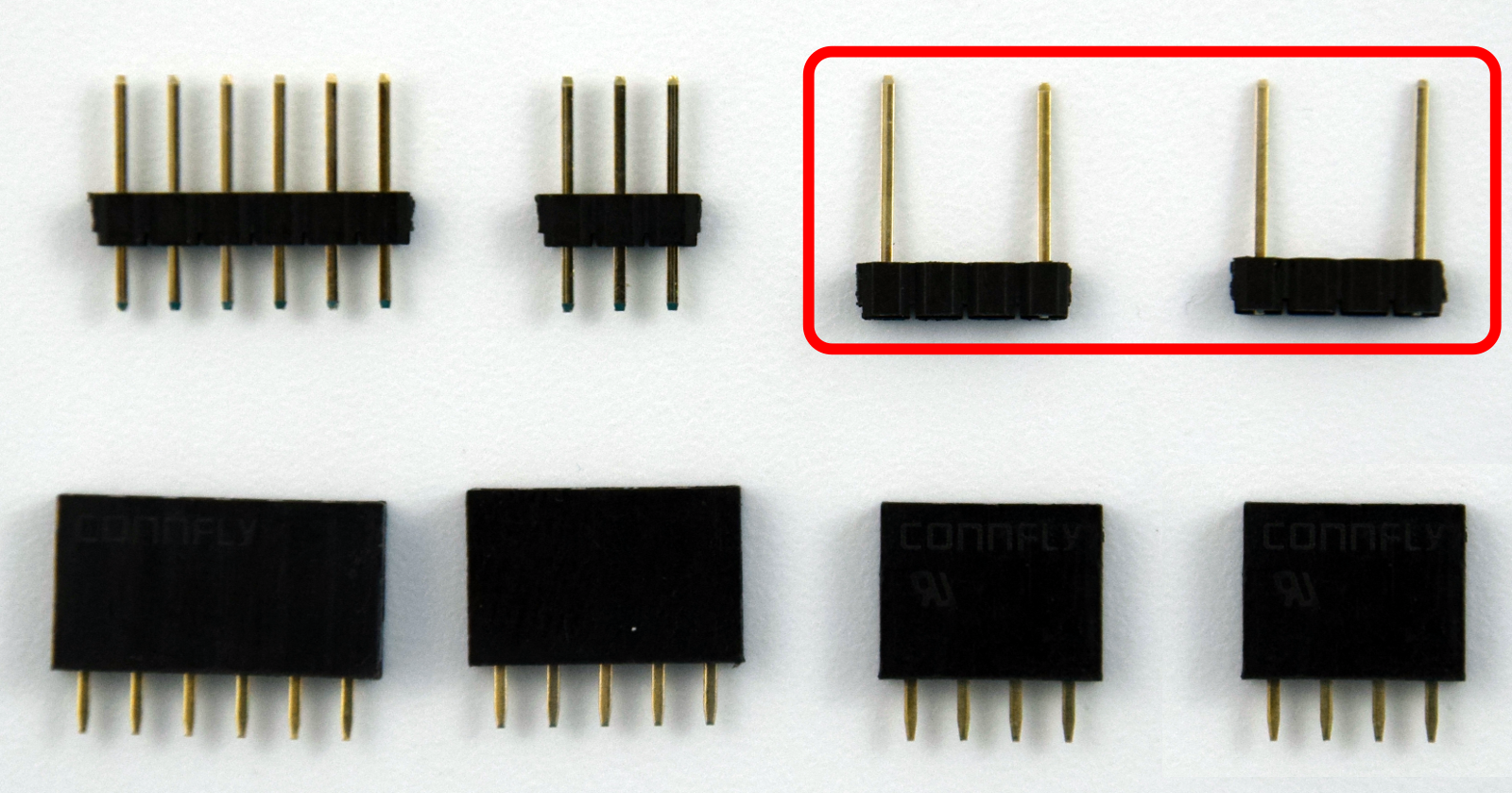
En primer lugar vamos a preparar las dos tiras macho de 4 pines. Si te fijas en la fotografía de la derecha, hay que quitar los dos pines centrales de estos conectores (quitarlos, no cortarlos). Para ello podemos usar unos alicates planos y tirar de la parte más larga de cada uno de estos pines centrales. Además hay que desplazar los dos pines de los extremos (por su parte más corta), de forma que queden alineados con la parte inferior del bloque de plástico negro, tal y como se muestra en el recuadro rojo.
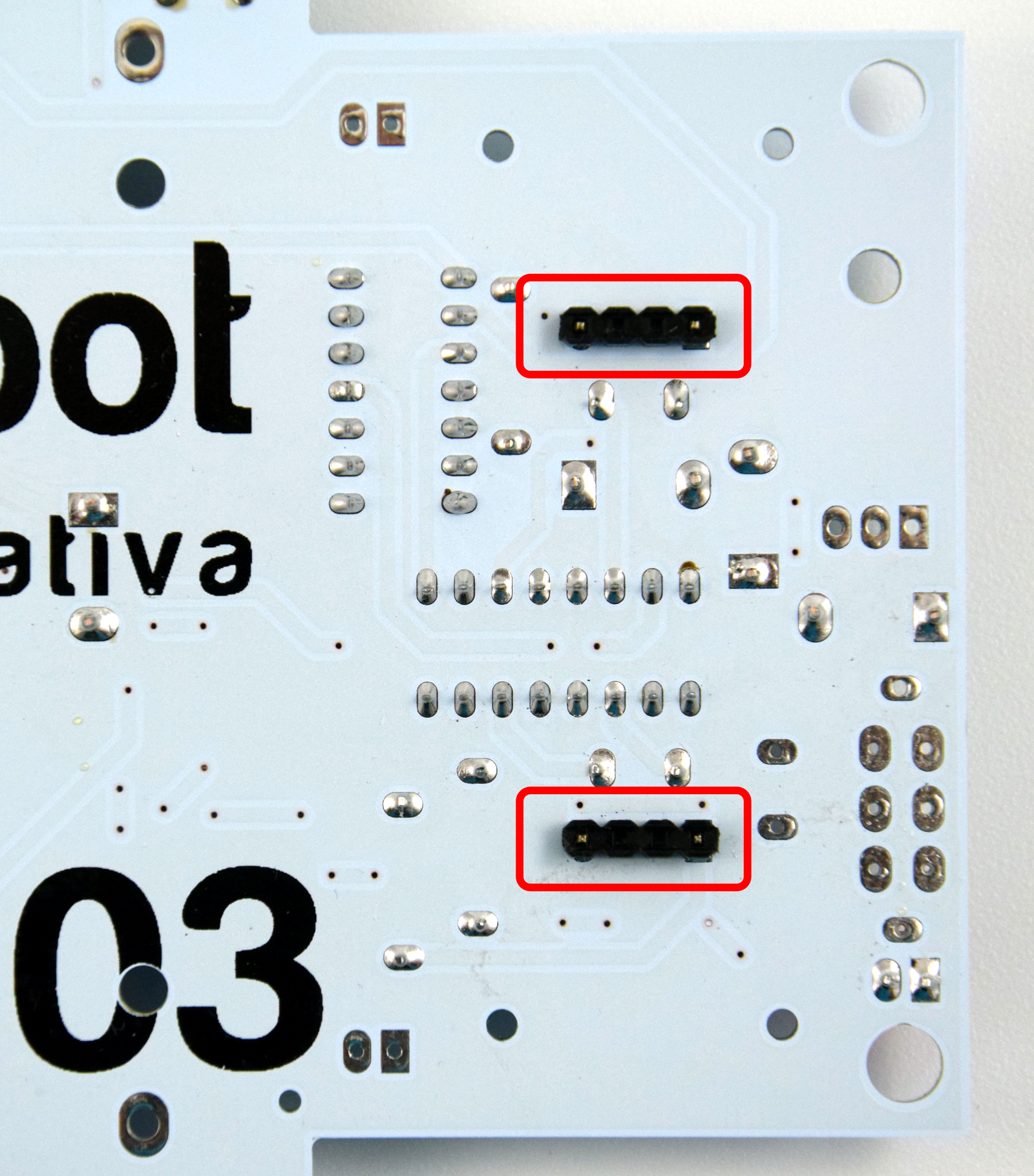
A continuación introducimos estos conectores por la parte inferior del circuito impreso (foto de la derecha) y lo soldamos por el lado del resto de los componentes (ver foto superior). Recuerda no cortar los conectores.
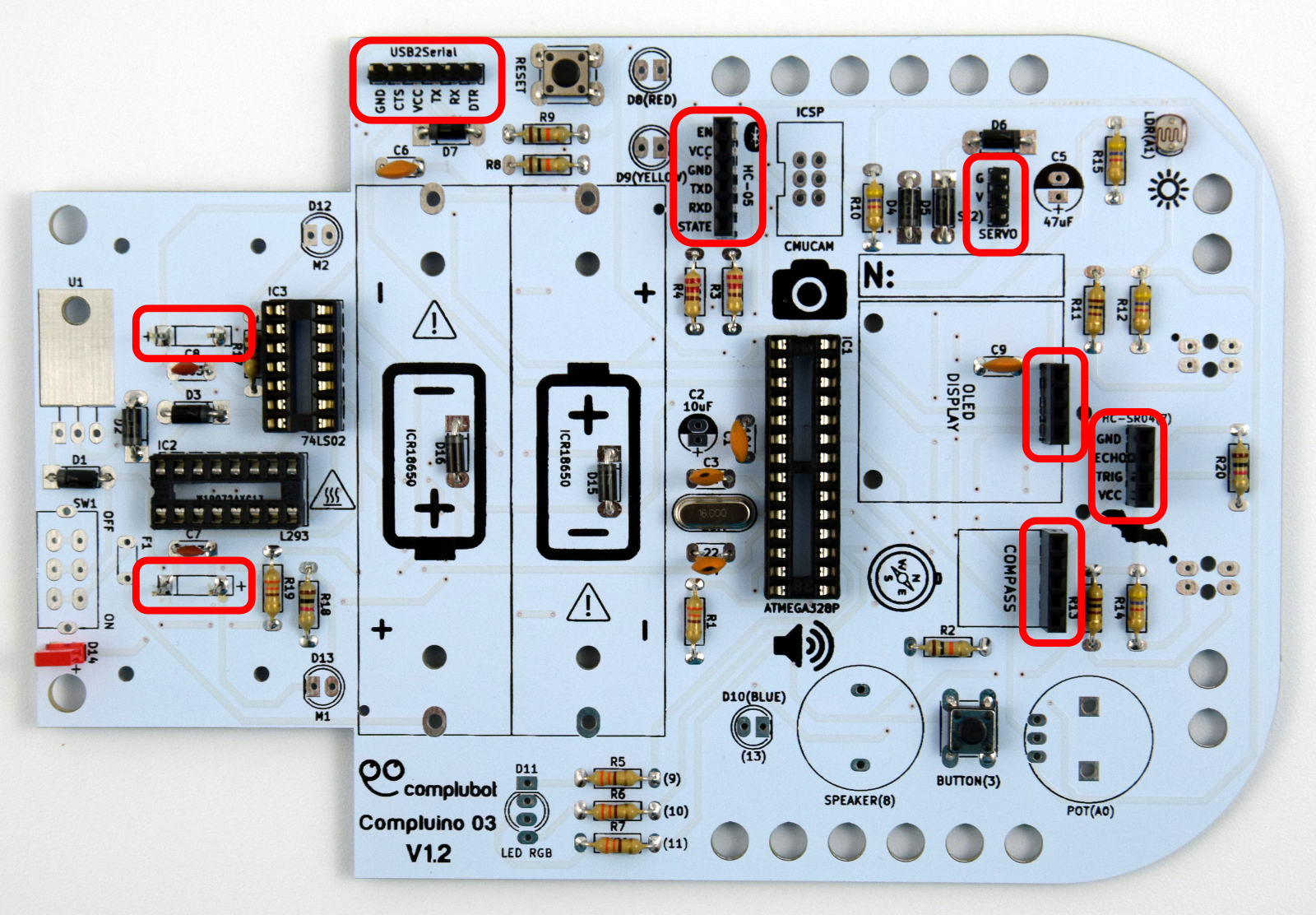
El resto de las tiras de pines se sueldan tal y como se muestran en la foto superior. Mira bien y no te confundas con las dos tiras de 6 pines: la tira de 6 pines macho se suelda para el adaptador de descarga (USB2Serial) colocada de forma horizontal en la parte superior de la imagen, y la tira de 6 pines hembra nos permitirá conectar el módulo Bluetooth HC-05 colocada de forma vertical en la parte central de la imagen. El resto de conectores de tira de pines no tienen pérdida para soldarse correctamente. En cualquier caso verifica su posición en la fotografía antes de proceder a la soldadura.
Paso 11 – Conector ICSP
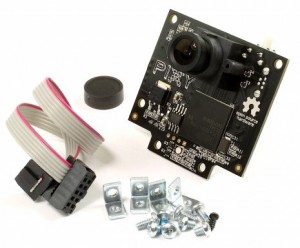
El conector ICSP (el que está situado encima del dibujo de una cámara), es un conector para cable plano de 6 pines (2×3). Mediante esta conexión podemos usar un programador externo para programar Compluino 03 (una opción que no está soportada en esta información), pero también nos sirve para conectar un módulo inteligente de visión CMUCam5 Pixy, como el que se muestra en la fotografía de la derecha. Este módulo no esta incluido en el kit, pero es un complemento muy interesante.

Para soldar correctamente el conector ICSP hay que fijarse en la muesca de la izquierda del dibujo que hay sobre el circuito impreso y hacerla coincidir con la muesca del conector.
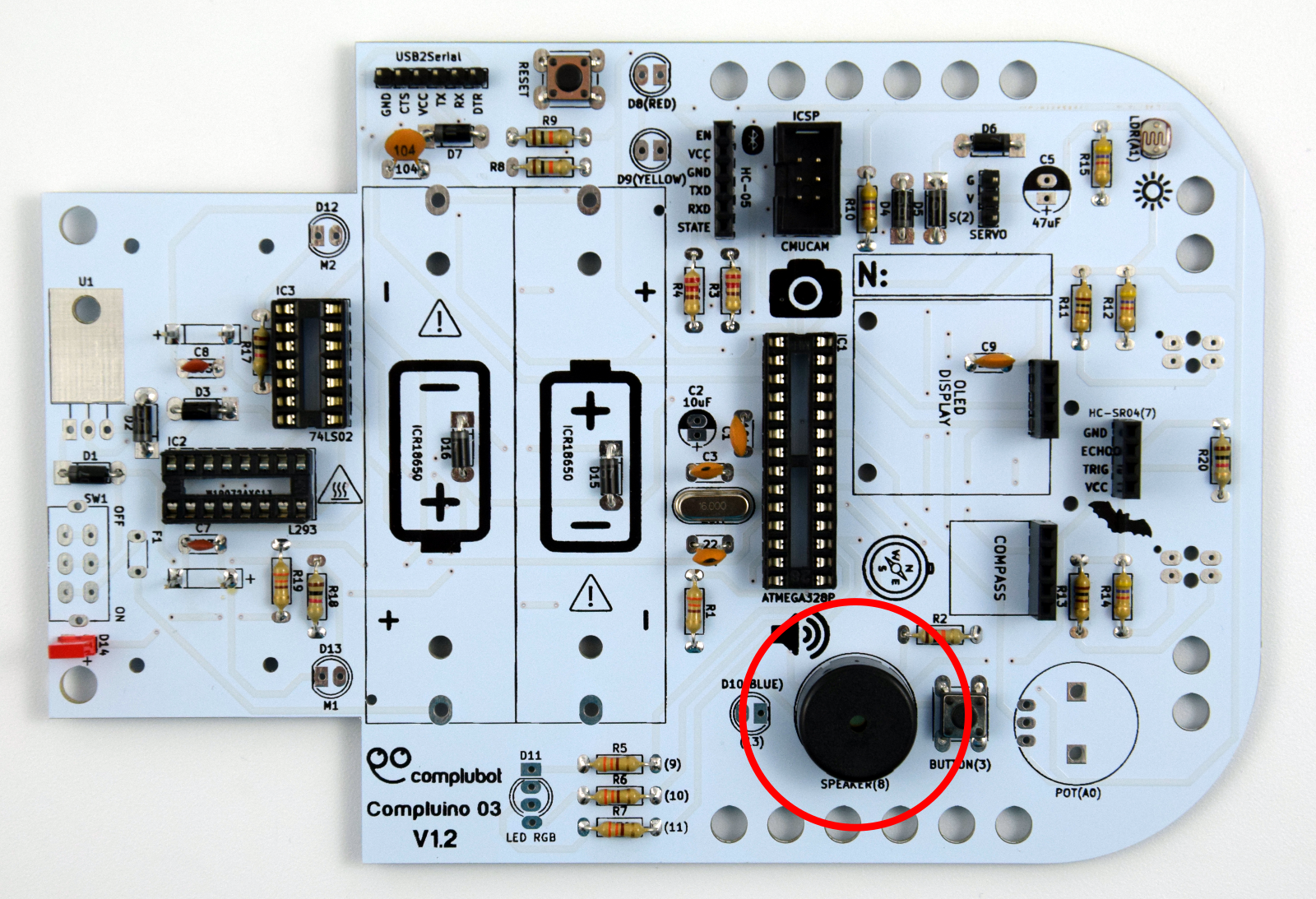
Paso 12 – Altavoz piezoeléctrico

El altavoz piezoeléctrico que usamos en este robot (LD-BZPN-1307) es un emisor de sonido pasivo que permite a Compluino 03 emitir sonidos de una gran variedad de frecuencias.
Este componente no tiene polaridad, así que solo tenemos que colocarlo en la posición que se muestra en la fotografía inferior para poder soldarlo correctamente.
Paso 13 – Resto de los ledes

El resto de los ledes de Compluino 03 son circulares de 5mm, si bien hay algunas diferencias entre ellos.
En los cuatro primeros ledes de la imagen que se muestra en la derecha, identificar el terminal negativo es muy sencillo: es el más corto. Este pin es el que tenemos que hacer coincidir con el pad de soldadura rectangular que coincide con un chaflán plano del dibujo casi circular de la serigrafía del circuito impreso de cada led. El quinto led de la imagen, el que tiene cuatro terminales, es un led RGB y su terminal identificador es el más largo, si bien este se coloca en el segundo pad, comenzando por la parte superior de D11.

Coloca los ledes fijándote en los colores que se muestran en la imagen superior. Por cierto, el led que es de color blanco difuso no emite luz blanca. Aunque eso lo podrás ver cuando hagamos que el robot se mueva. De momento nos conformaremos con fijarnos bien en la polaridad de los ledes para no confundirlos.
Paso 14 – Condensadores electrolíticos
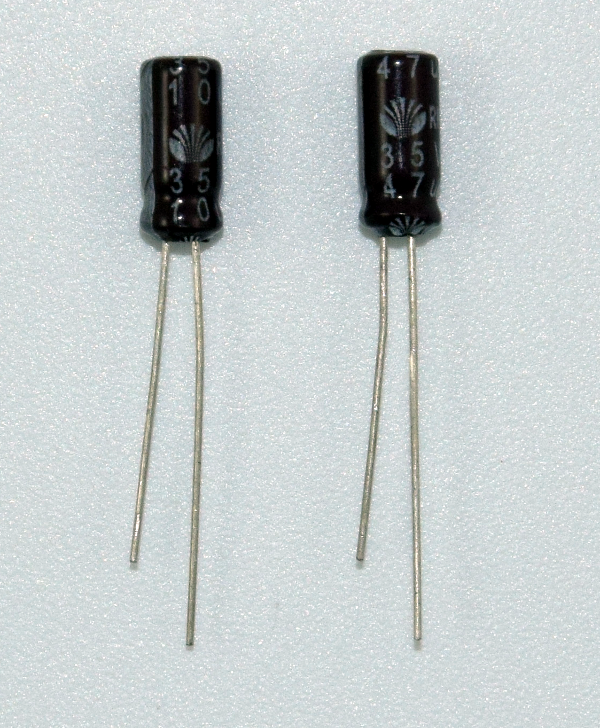
En Compluino 03 hay dos condensadores electrolíticos, este tipo de condensador sí tiene polaridad: el terminal más largo es el positivo (ver foto de la derecha). Y este es el que tenemos que hacer coincidir con el signo «+» de la serigrafía. Un detalle muy importante. Aunque pueden parecer iguales, estos condensadores tienen un valor (capacidad) distinto (lo pone en el propio cuerpo del condesador). Así C2 es de 10uF y C5 de 47uF.

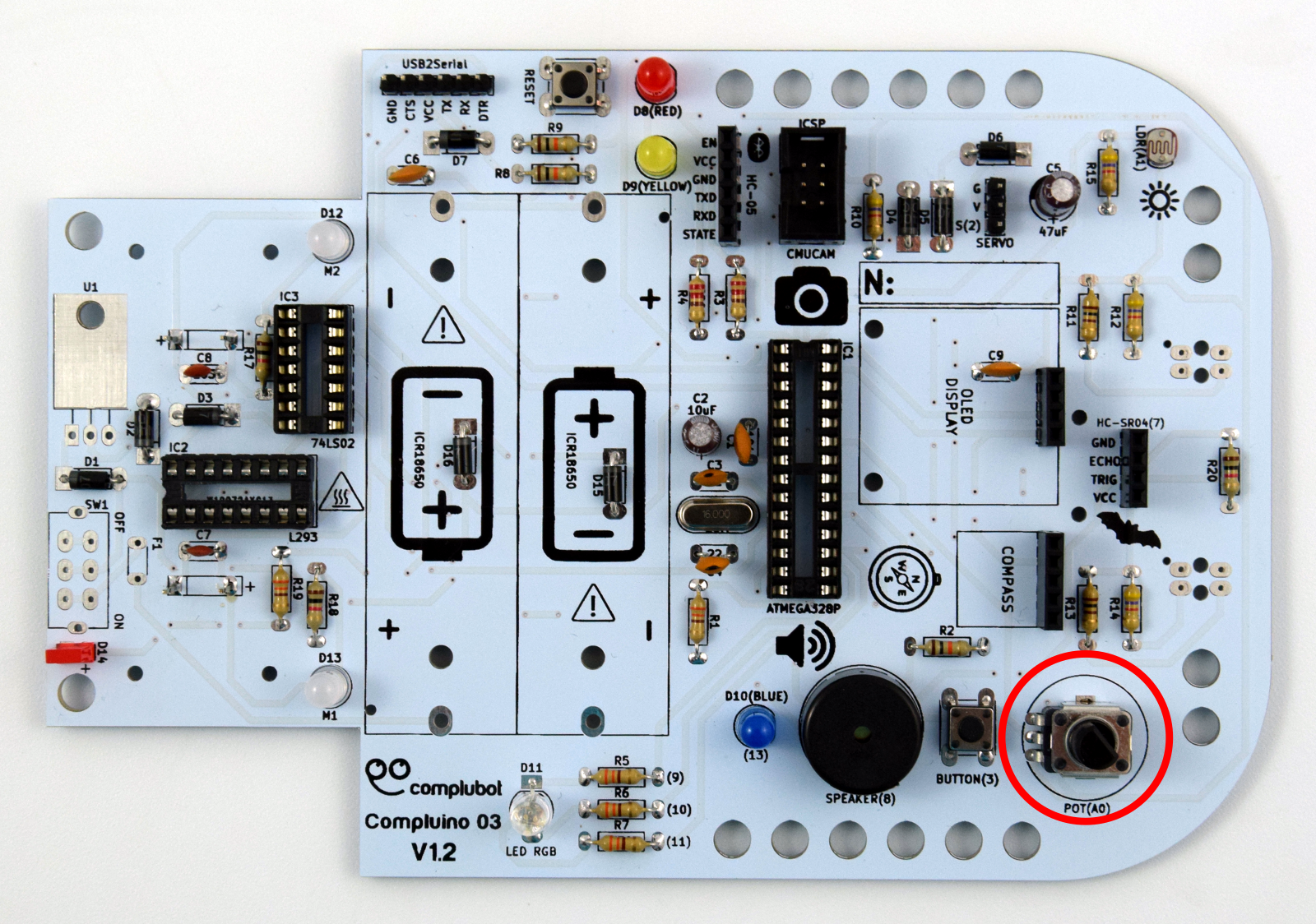
Paso 15 – Potenciómetro
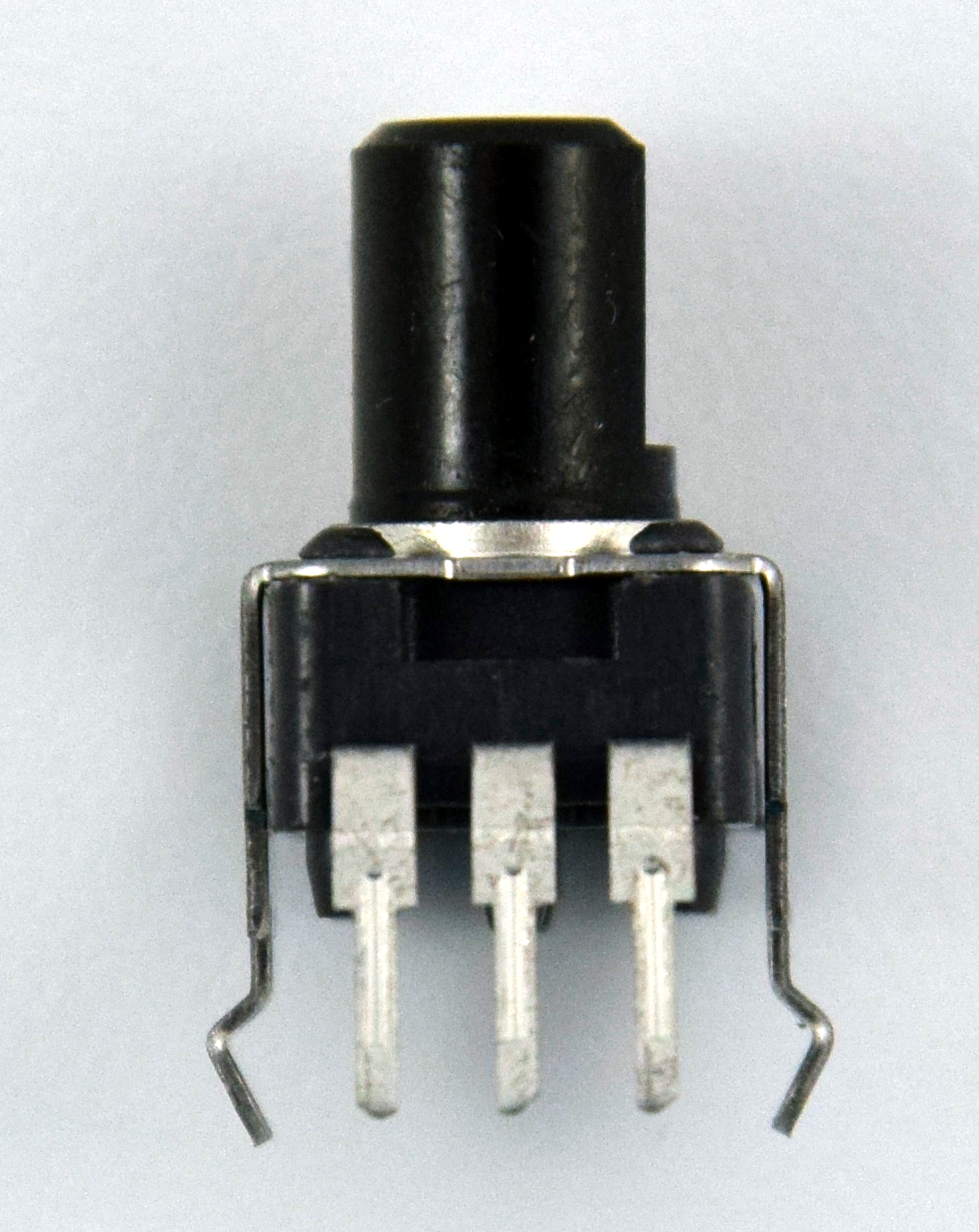
Un potenciómetro es una resistencia variable que se ajusta girando un eje de control. Aunque normalmente un potenciómetro tiene tres terminales, el nuestro dispone de cinco ya que además de los tres terminales de la resistencia variable dispone de dos terminales adicionales para su anclaje mecánico
Antes de soldarlo aseguraté que esta bien anclado aprentandolo con los dedos. Una vez conseguido esto, procede a soldar los cinco terminales.
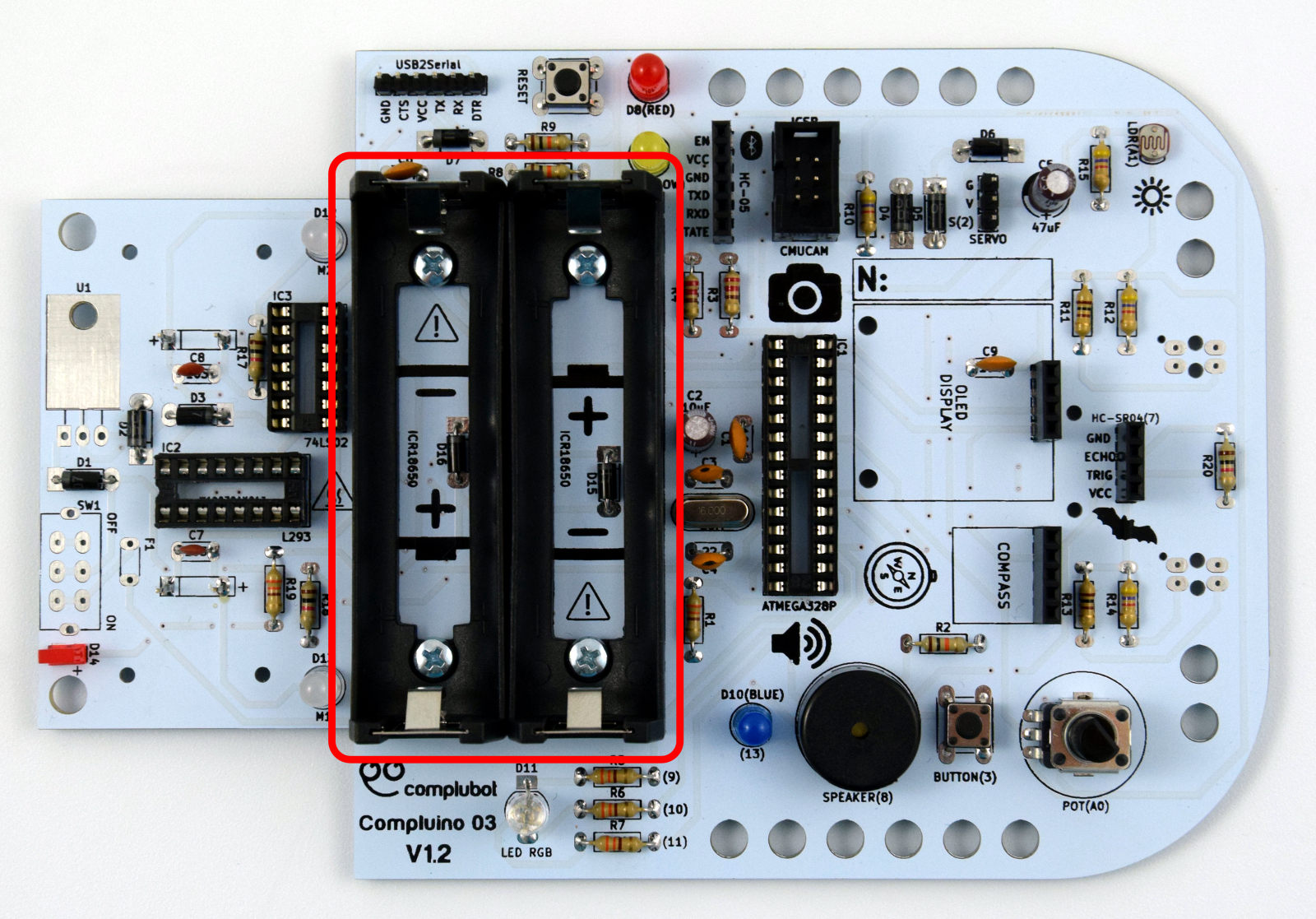
Paso 16 – Portapilas
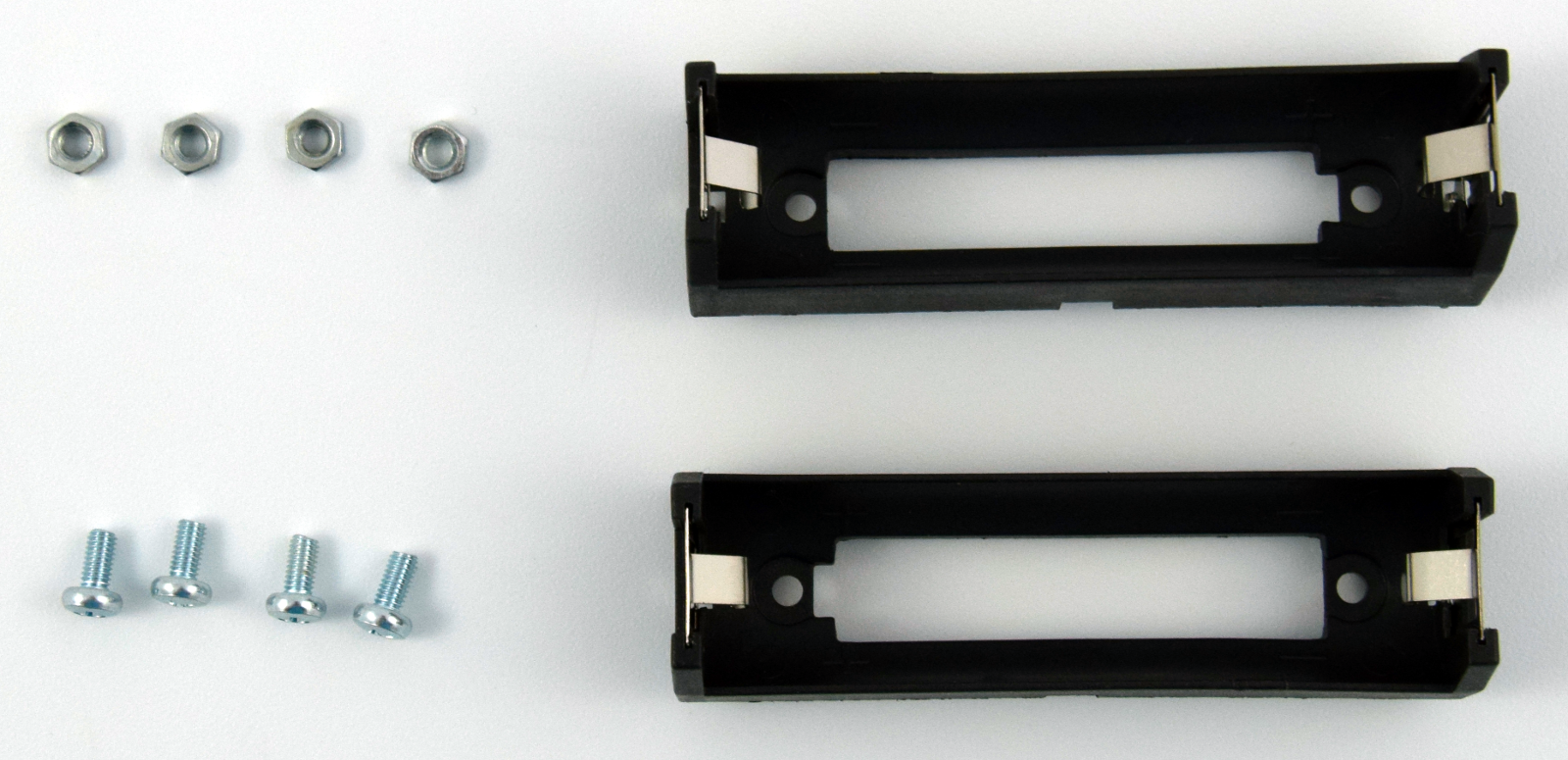
Para poder conectar las baterías de Li-Ion de Compluino 03, tenemos que montar dos portapilas del tipo MR18650. Importante: antes de soldar los portapilas hay que colocarlos sobre el circuito impreso (fíjate en el saliente que marca la posición correcta en cada portapilas) y sujetarlos con cuatro tornillos y tuercas de M3 (son 5 de esta medida los que hay en el kit). Una vez apretados los tornillos con un destornillador de estrella (PH1), ya podemos soldar los cuatro terminales de conexión de los portapilas.
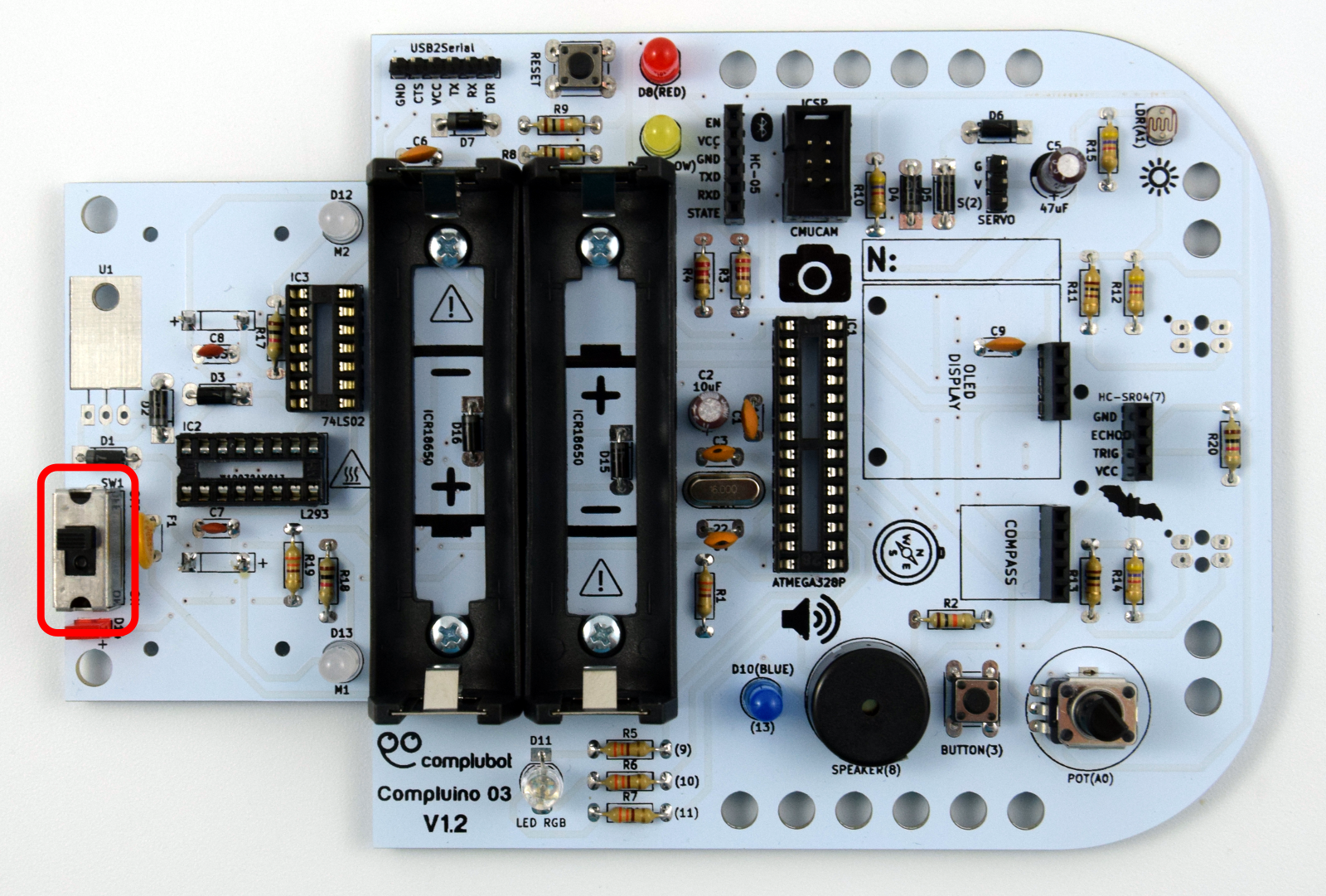
Paso 17 – Interruptor
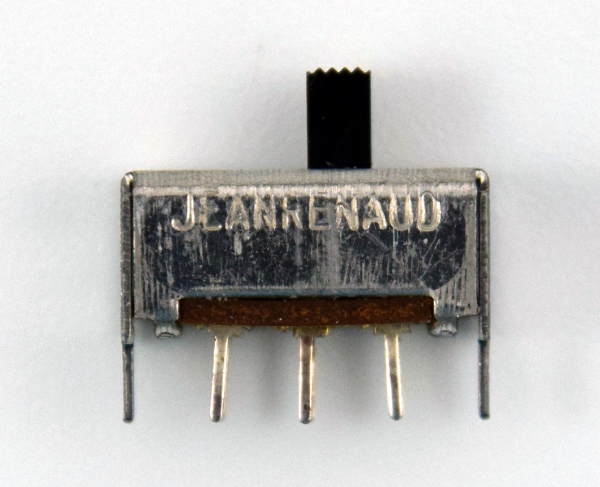
El interruptor de encendido de Compluino 03 es en realidad un conmutador de dos posiciones y dos circuitos. Los dos circuitos del conmutador están conectados en paralelo para duplicar su capacidad de corte de corriente.
Coloca el interruptor en la zona indicada del circuito impreso y presiona bien con los dedos hasta que quede fírmemente colocado. Una vez hecho esto, puedes soldar los ocho terminales: seis del conmutador y dos de sujección mecánica.
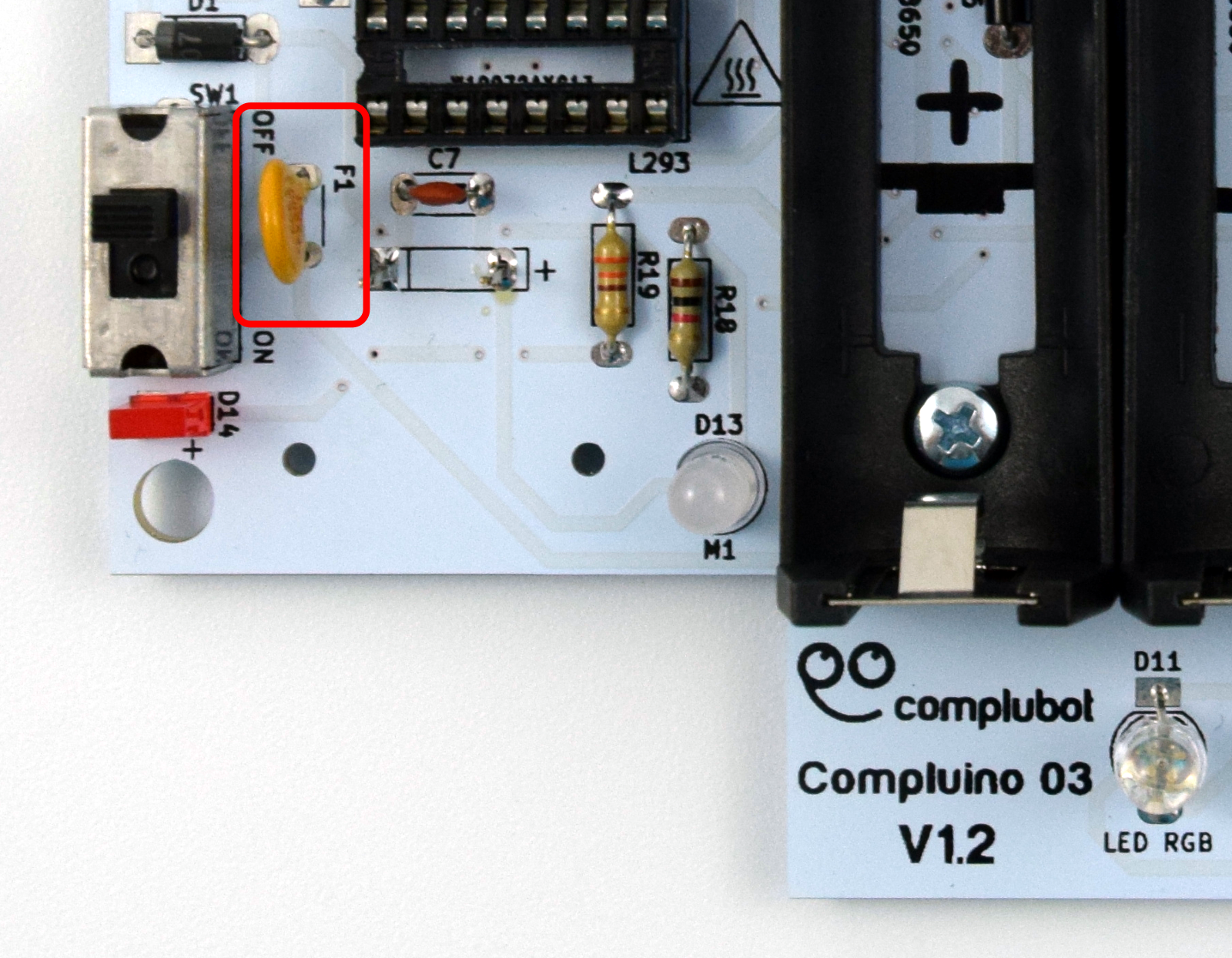
Paso 18 – Polifusible

Compluino 03 utiliza un polifusible como mecanismo de protección contra cortocircuitos y sobreintensidades. El polifusible es de 2A y tiene un sistema de rearme automático en caso de activación. Identificar el polifusible es sencillo, es de color naranja y pone «FX200» en uno de sus laterales. Este componente no tiene polaridad, así que solo hay que colocarlo y soldarlo en la posición indicada en la fotografía inferior sin tener en cuenta su orientación
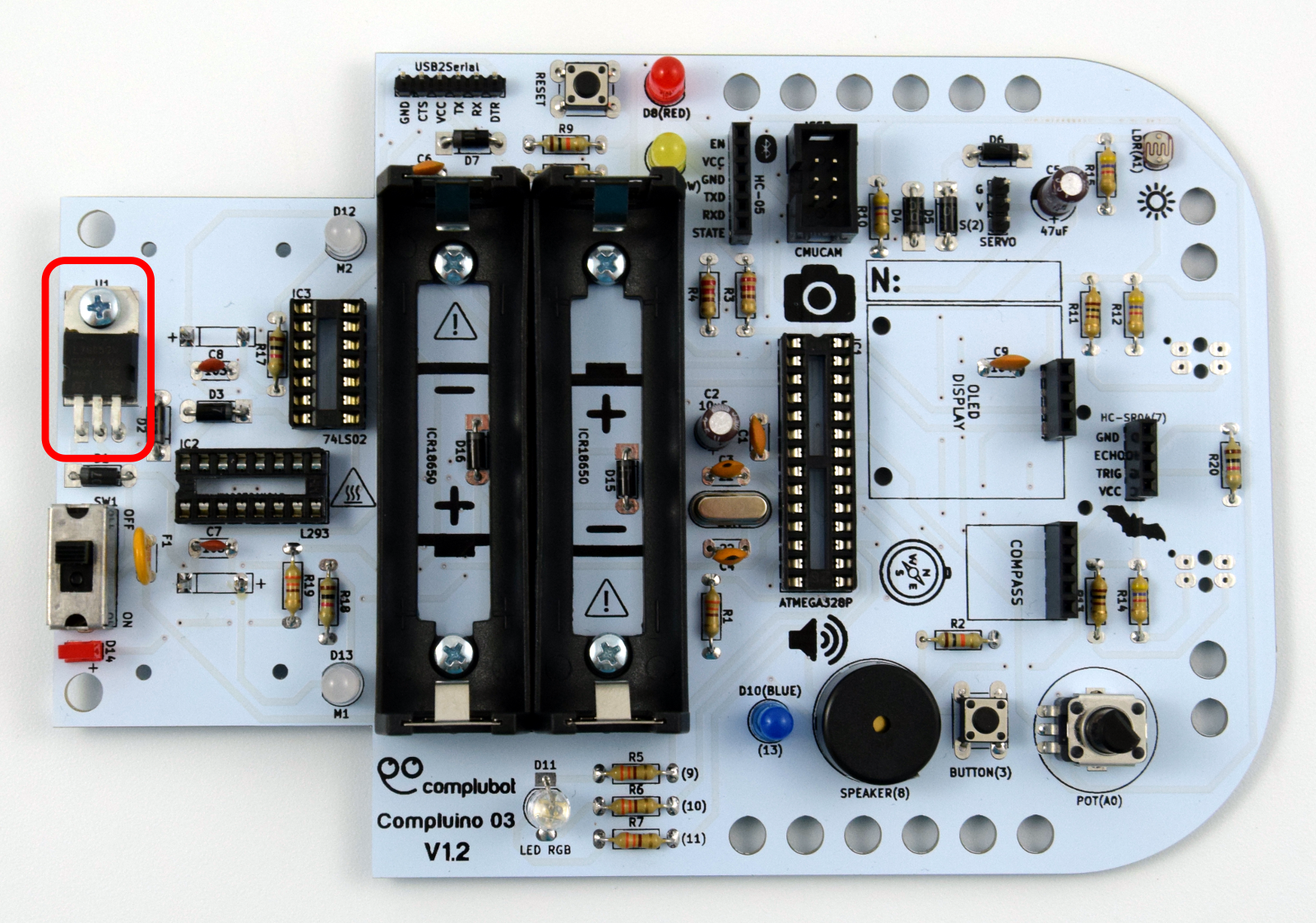
Paso 19 – Regulador de 5V
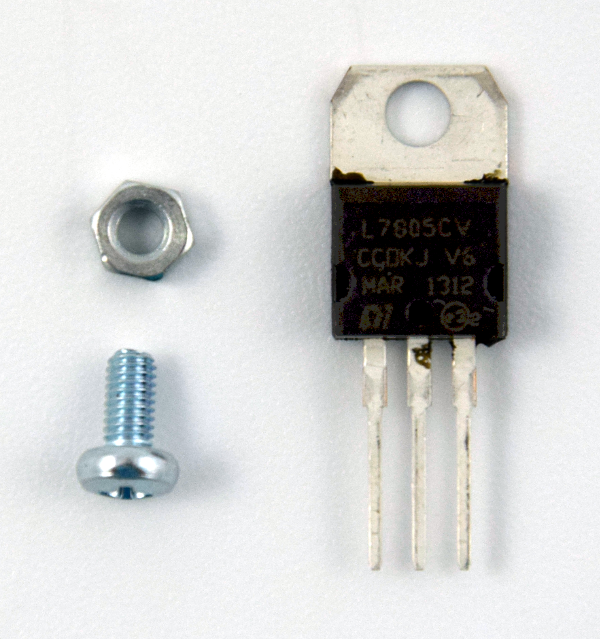
La electrónica interna de Compluino 03 funciona a 5V. Para conseguir este voltaje a partir de la tensión de las baterías usamos un regulador serie del tipo 7805. Antes de soldar este componente hay que conformar sus terminales doblándolos en un ángulo de 90º, colocarlo en el circuito impreso en la posición que se muestra en la imagen y sujetarlo con un tornillo y tuerca de M3. Una vez realizado este proceso ya podemos soldar los terminales y cortar el trozo sobrante por encima de la soldadura.
Paso 20 – Motores
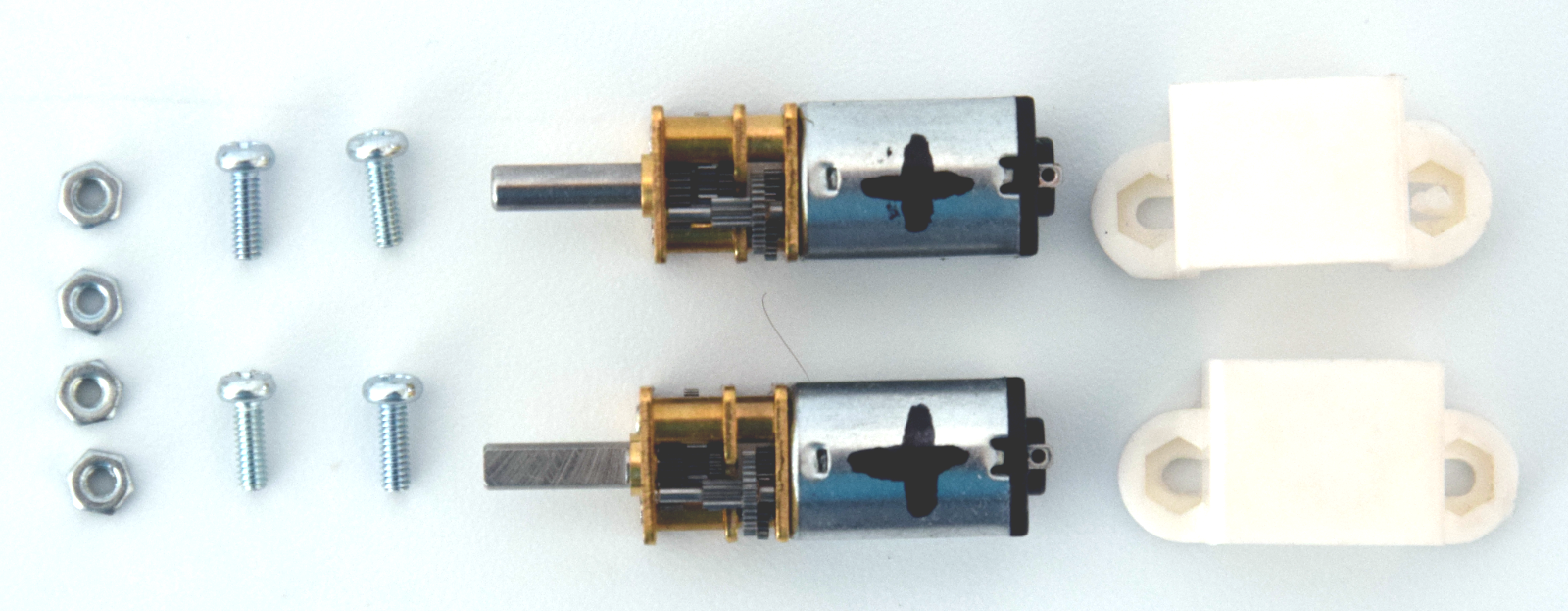
El sistema motriz de Compluino 03 se basa en una «plataforma diferencial». Esto es, está constituido por dor ruedas motorizadas y un punto deslizante (rueda loca). Los motores que hemos seleccionado incorporan una reductora con engranajes metálicos que queda parcialmente descubierta, de forma que podamos observar su funcionamiento. La velocidad máxima de rotación es de 38rpm, que nos proporciona un movimiento lento pero potente, que nos permite analizar el funcionamiento y transportar una cierta carga en el robot (sistema de visión, servos con manipuladores…).
Antes de soldar el motor hay que identificar el símbolo «+» que aparece indicado con un rotulador en el lateral del curpo del robot. Se debe hacer coincidir este símbolo con el «+» que aparece en el circuito impreso. Para colocarlo más fácilmente es conveniente separar un poco los pines de los terminales de las tiras de pines que ya están soldadas. De esta forma podemos colocar el motor entre ambas, quedando sus contactos en el interior pero tocando los pines. A continuación ponemos los soportes de los motores quedando la parte recta hacia el interior del robot. Dentro del soporte hay una muesca que encaja perfectamente con uno de los elementos mecánicos de la estructura de la reductora.
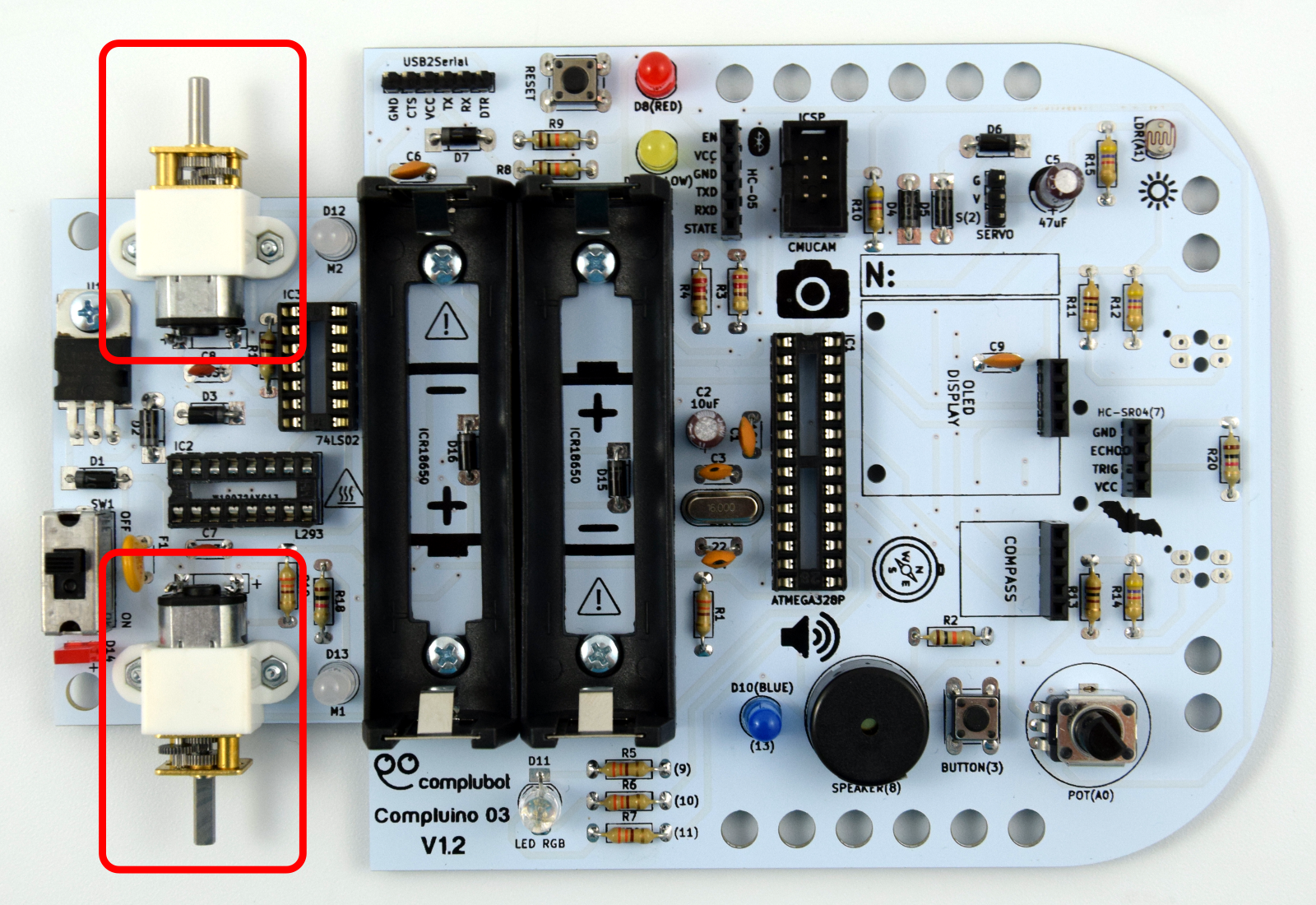
A continuación colocamos las tuercas de M2 en los alojamientos de los soportes del motor y atornillamos los tornillos de M2 x 6 desde la parte inferior del circuito impreso. Una vez sujetados mecánicamente los motores procedemos a su soldadura, uniendo con una gota de estaño cada terminal del motor con el pin de conexión.
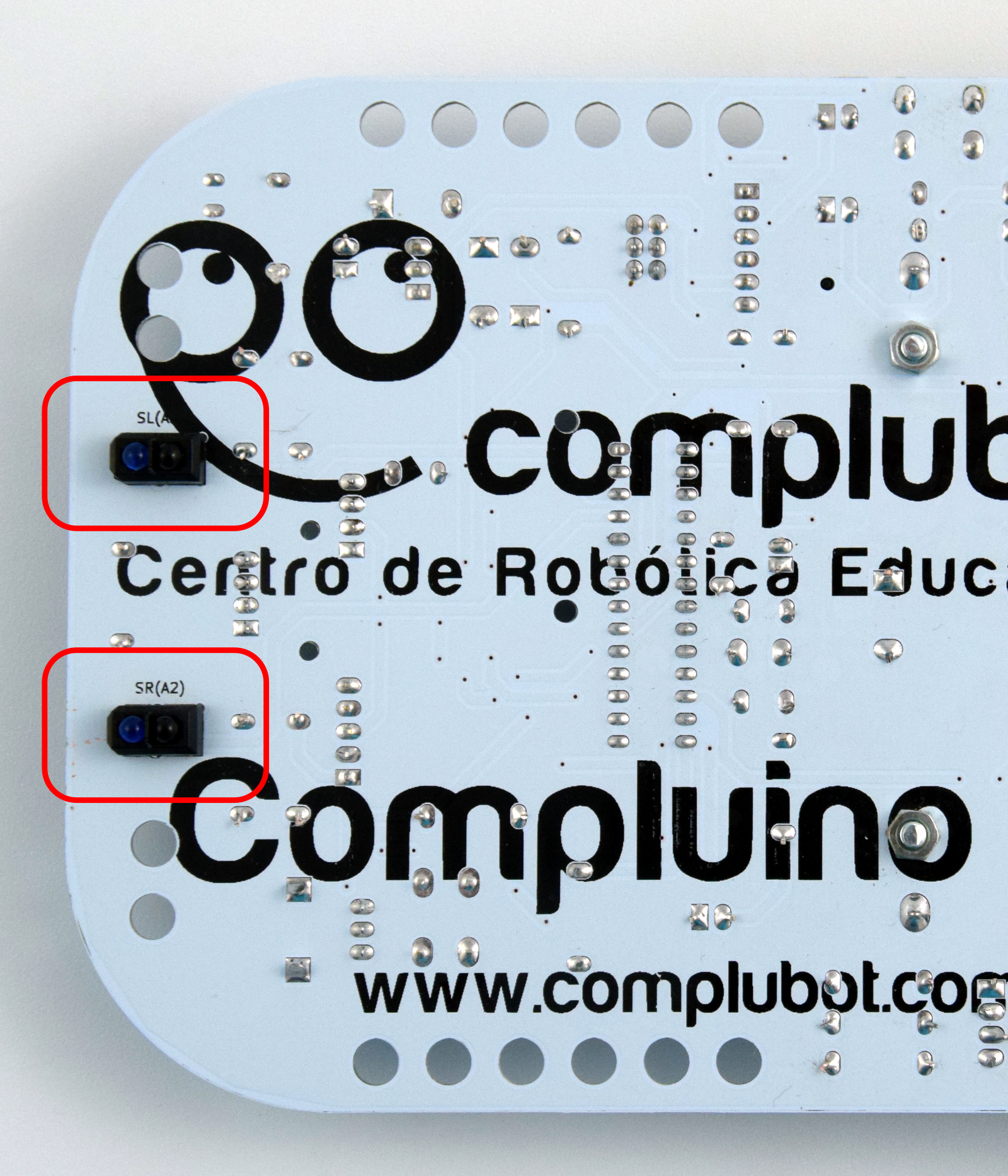
Paso 21 – Sensores reflexivos
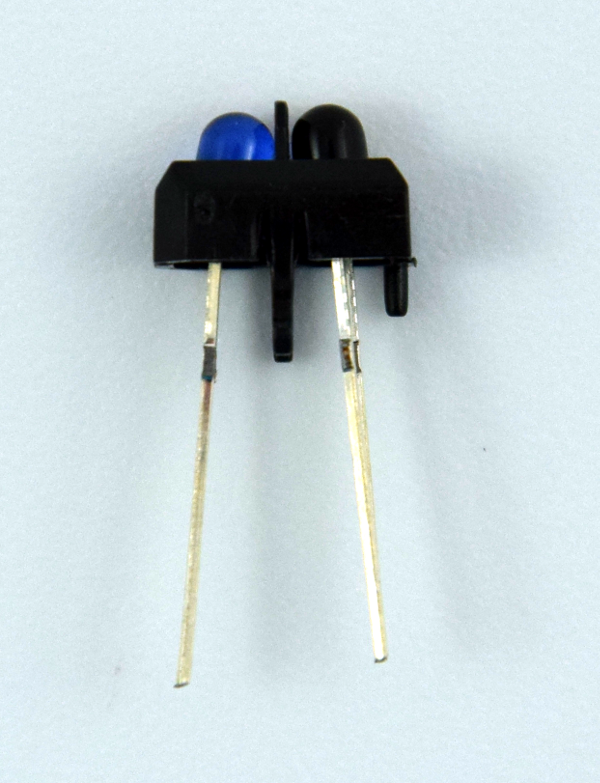
Compluino 03 dispone de dos sensores reflexivos de IR que se colocan en la parte inferior del robot. Hay que observar que el cuerpo de cada sensor dispone de dos patillas de anclaje en la zona central y de un saliente en un extremo. Por tanto hay que colocar el sensor, desde la parte inferior del circuito impreso, haciendo coincidir el saliente con un pequeño agujero circular que hay en una de las esquinas. De esta forma la silueta del sensor coincide con el dibujo de la serigrafía del circuito impreso.
Una vez colocados y apretados ambos sensores procedemos a soldarlos desde la parte superior, cortando el trozo sobrante de los terminales, justo por encima de cada soldadura.
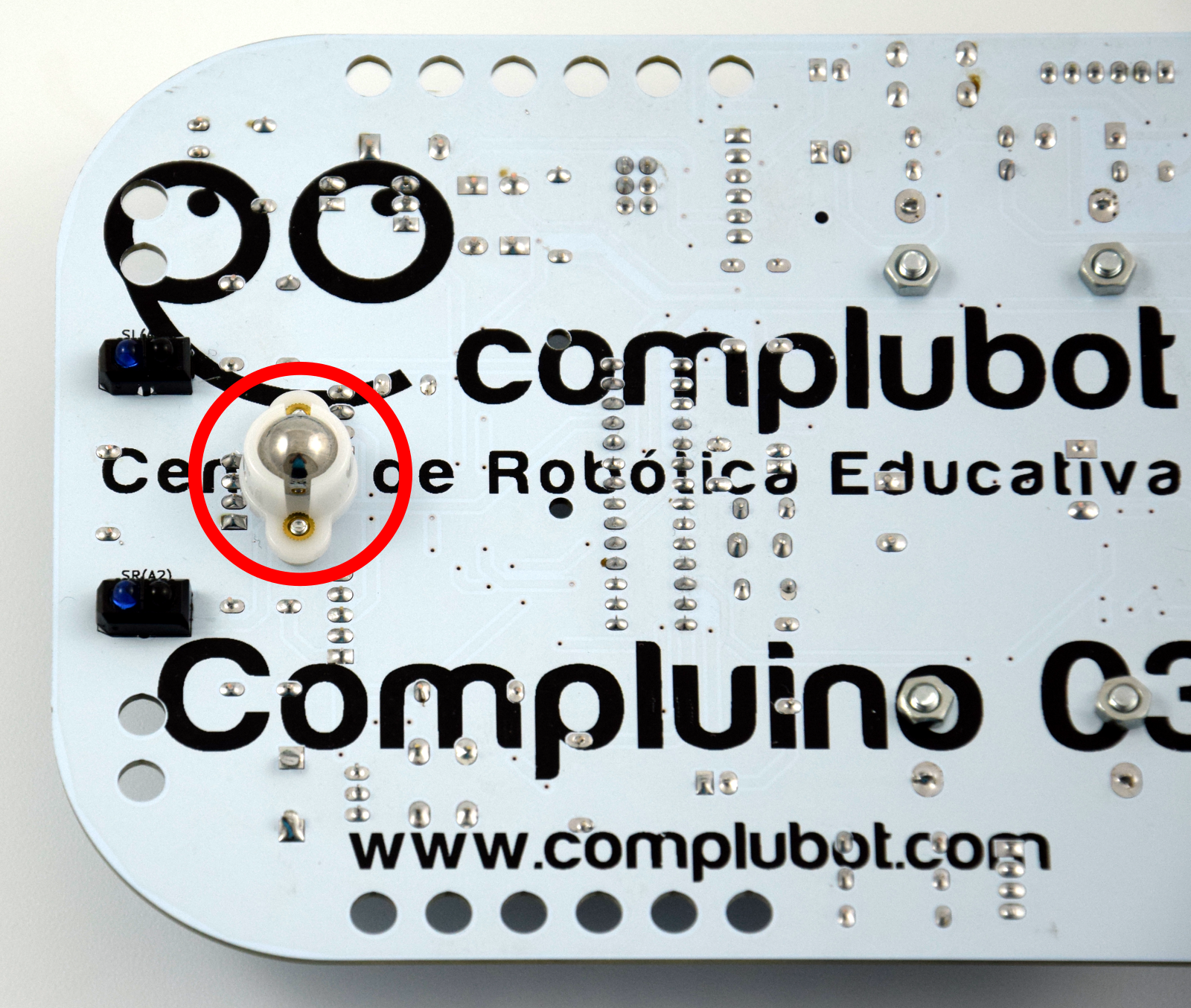
Paso 22 – Rueda loca

Colocar la rueda loca es muy sencillo, para ello solo tenemos de colocarla en la parte inferior del robot y fijarla mediante dos tornillos de M2 x 6 que apretaremos con un destornillador de estrella (PH1).
Paso 23 – Ruedas motrices
Las ruedas motrices se conectan mecánicamente al eje de cada motor.
Para colocarlas tenemos que fijarnos en el agujero central de la rueda y hacer coincidir la parte plana de éste con la parte plana equivaliente del eje del motor. Una ligera presión es suficiente para introducir el eje del motor hasta que quede enrasado en el lado contrario de la rueda, nada más.
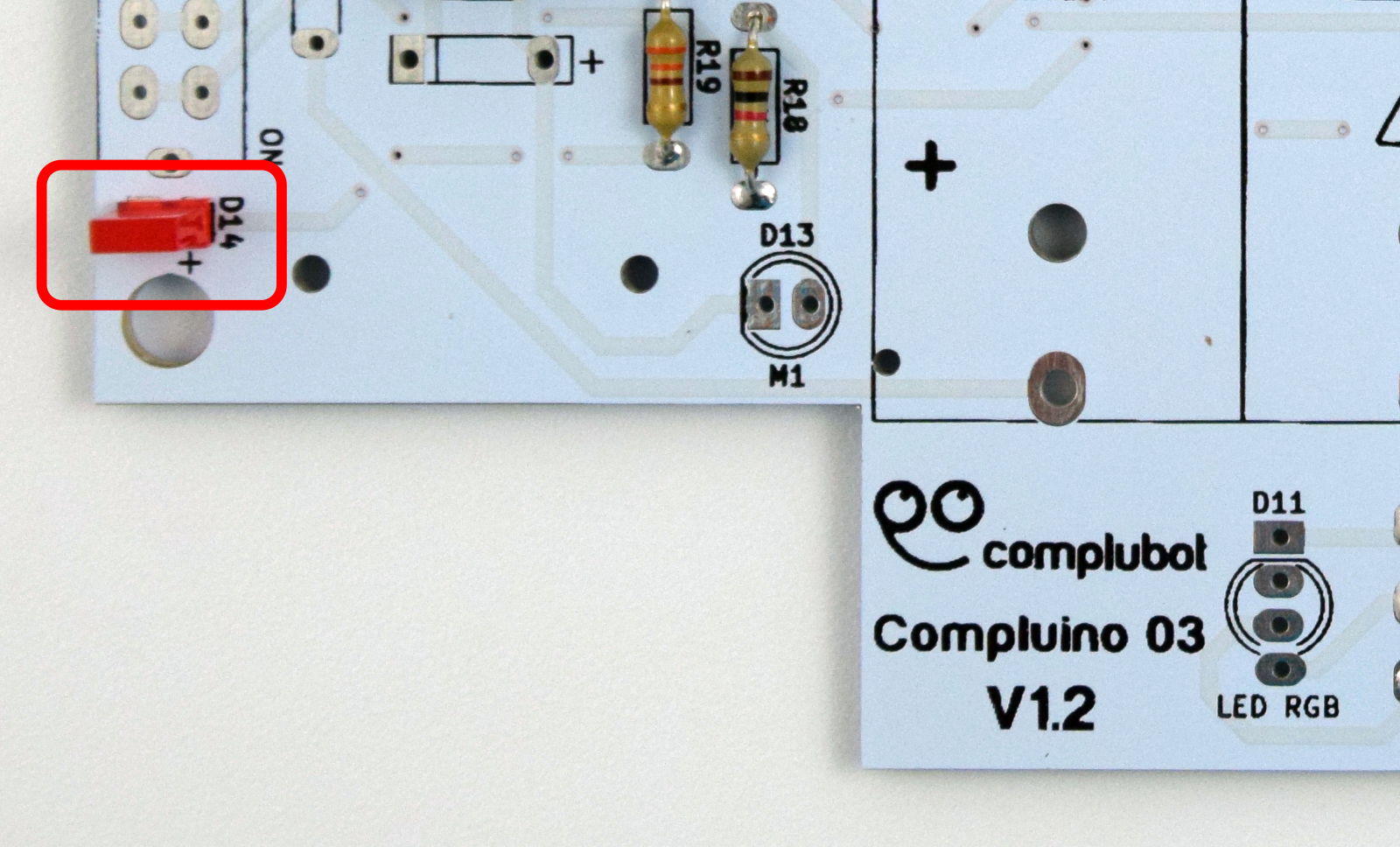
Paso 24 – Prueba de encendido

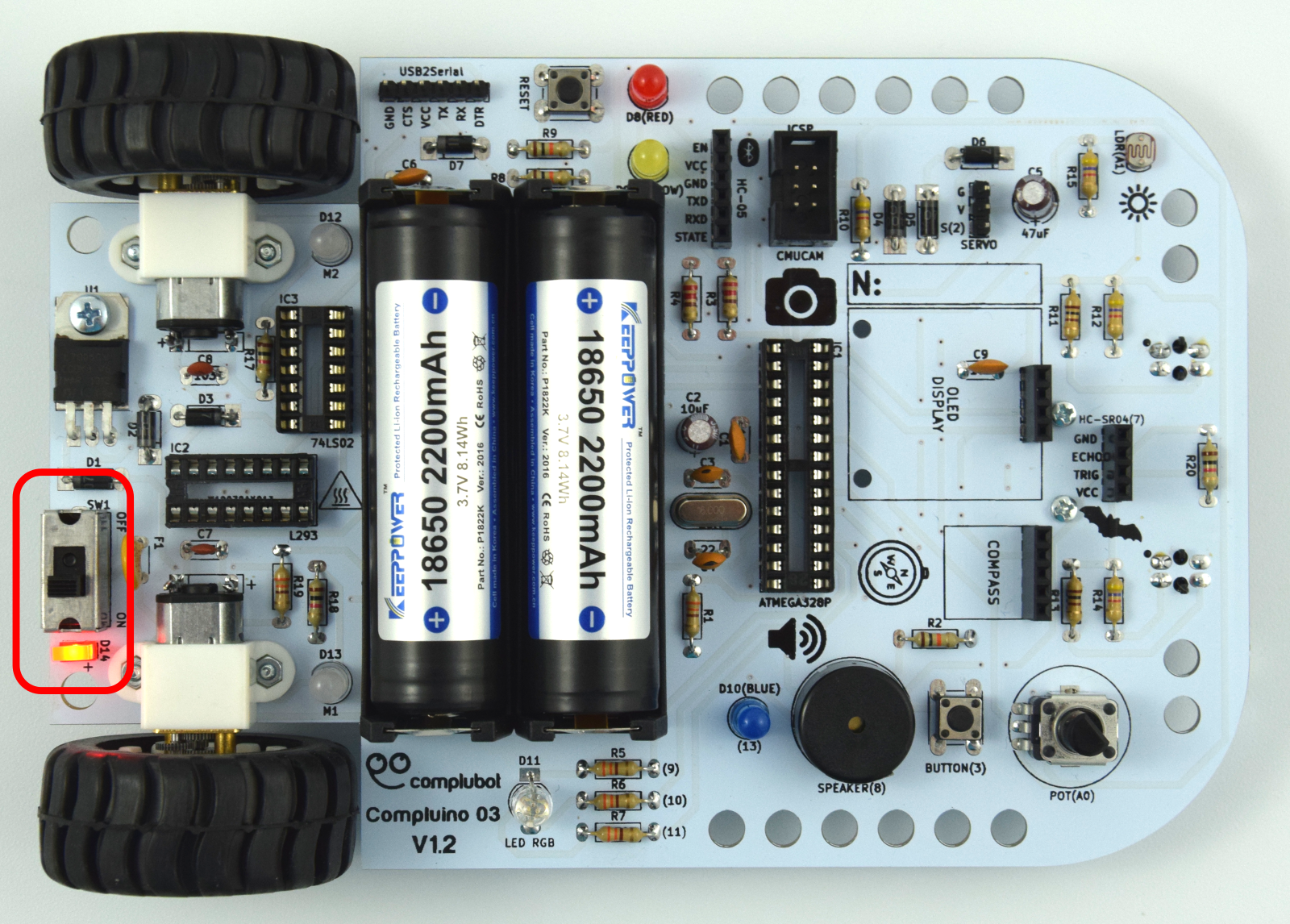
Ha llegado el momento de realizar la primera prueba de encendido de nuestro Compluino 03. Con esta prueba comprobaremos el sistema de alimentación del robot. En primer lugar vamos a colocar el interruptor de encendido en la posición «OFF», a continuación colocamos las baterias en los portapilas prestando mucha antención a la polaridad de cada elemento (fíjate bien en la foto inferior). Luego movemos el interruptor a la posición «ON» y, si todo va bien, se tendrá que encender el led rectangular rojo de la esquina del robot.
Si no se enciende ese led rojo, procede de la siguiente manera:
- Apaga el interruptor de encendido, desplazándolo a la posición «OFF»
- Revisa la posición de las baterías
- Si sigue sin funcionar, comprueba el voltaje de las baterías con un multímetro y ponlas a cargar si el voltaje de cada elemento está por debajo de los 3,2V
- Si continúa sin funcionar, revisa con atención los pasos realizados hasta encontrar el error
- En ningún caso sigas con el proceso de montaje sin solucionar esta primera prueba de encendido
Paso 25 – Prueba de funcionamiento del microcontrolador
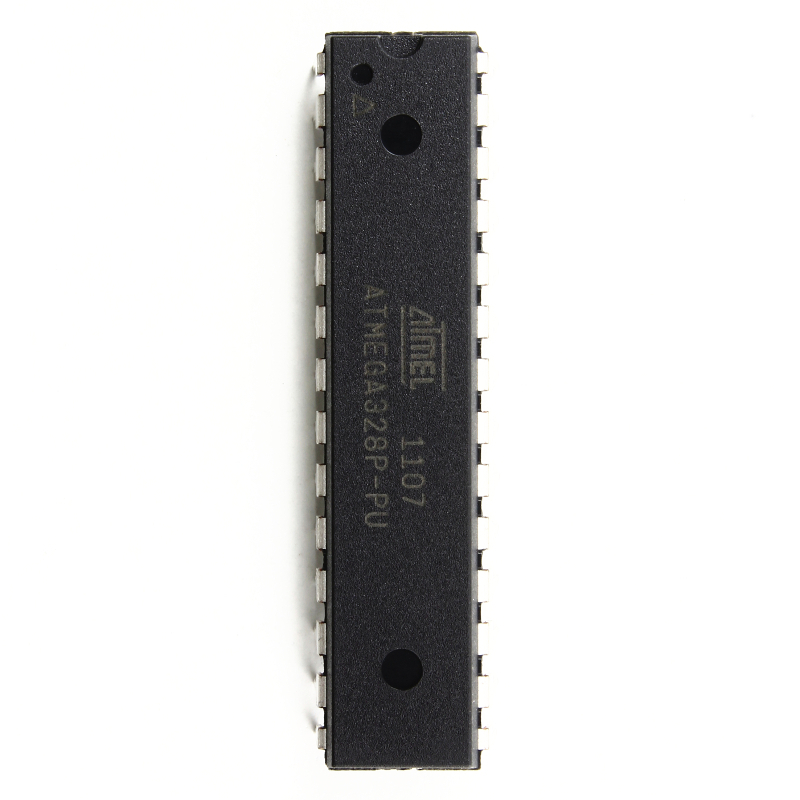
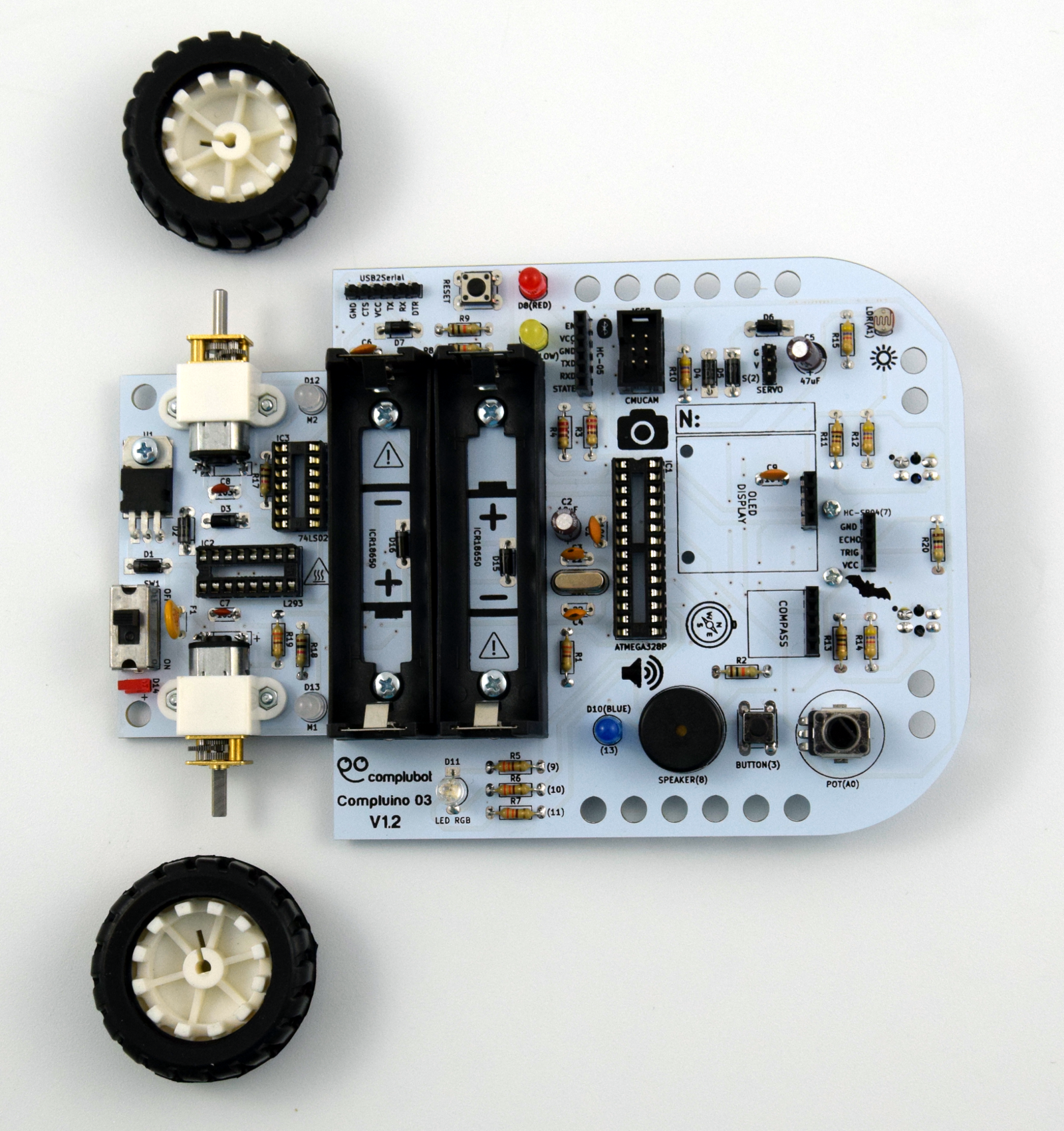
Seguimos con las pruebas y para ello en primer lugar vamos a quitar las baterías para guardarlas en su estuche. A continuación localizaremos el microcontrolador (ATmega328P) que montaremos en su zócalo haciendo coincidir la muesca de uno de los extremos con la del zócalo y la serigrafía del circuito impreso, tal y como se muestra en la siguiente imagen.
Para colocar el circuito integrado del microcontrolador sobre su zócalo, lo mejor es colocar un lado primero, luego hacer un poco de presión para encajar el otro lado y hacer presión de forma vertical para que entren todos los pines sin que se doble ninguno.
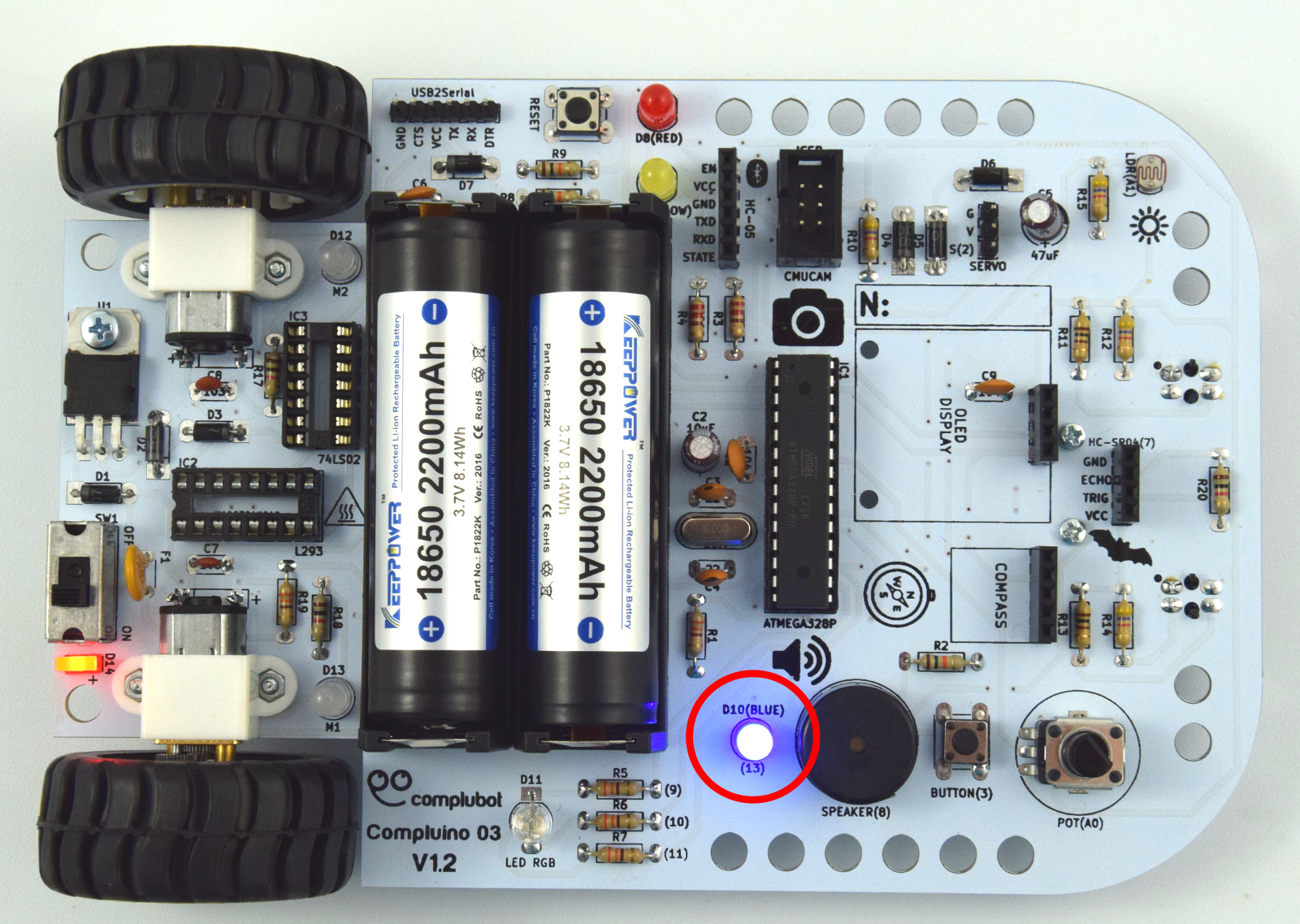
Una vez colocado el microcontrolador, colocamos las baterías (ten cuidado con la polaridad) y encendemos el robot. Si todo ha ido bien comenzará a parpadear el led azul que se indica en la imagen. Si esto no ocurre:
- Revisa la polaridad de las baterías
- Mira que todos los pines del microcontrolador hayan entrado bien en el zócalo, sin doblarse
- Revisa el montaje de los condensadores y del oscilador que se encuentran junto al microcontrolador
- En ningún caso sigas con el proceso de montaje sin solucionar este problema
Paso 26 – Montaje del resto de los circuitos integrados
Antes de seguir con este paso, vamos a retirar las baterias del robot y las guardamos en su caja de plástico. Las dejamos ahí hasta que se indique en esta guía de montaje.
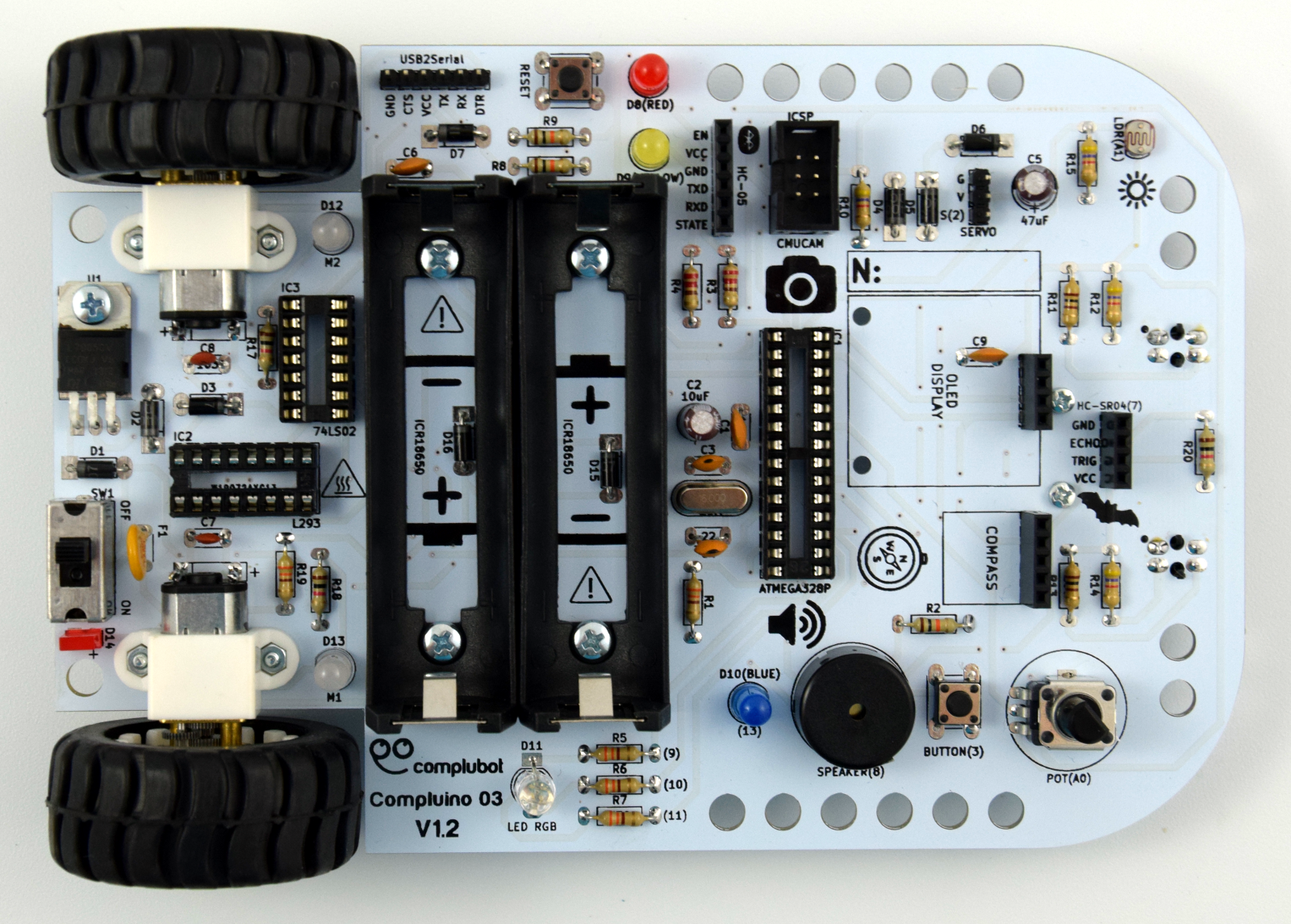
Aún nos quedan por colocar dos circuitos integrados: el 74HC02 (74LS02) de 2 x 7 pines y el L293D de 2 x 8 pines. Para colocarlos seguimos un proceso similar al que hemos realizado en el apartado anterior, prestando especial atención a la marca que hay en el extremo de cada circuito integrado y a la colocación que se muestra en la siguinte imagen.
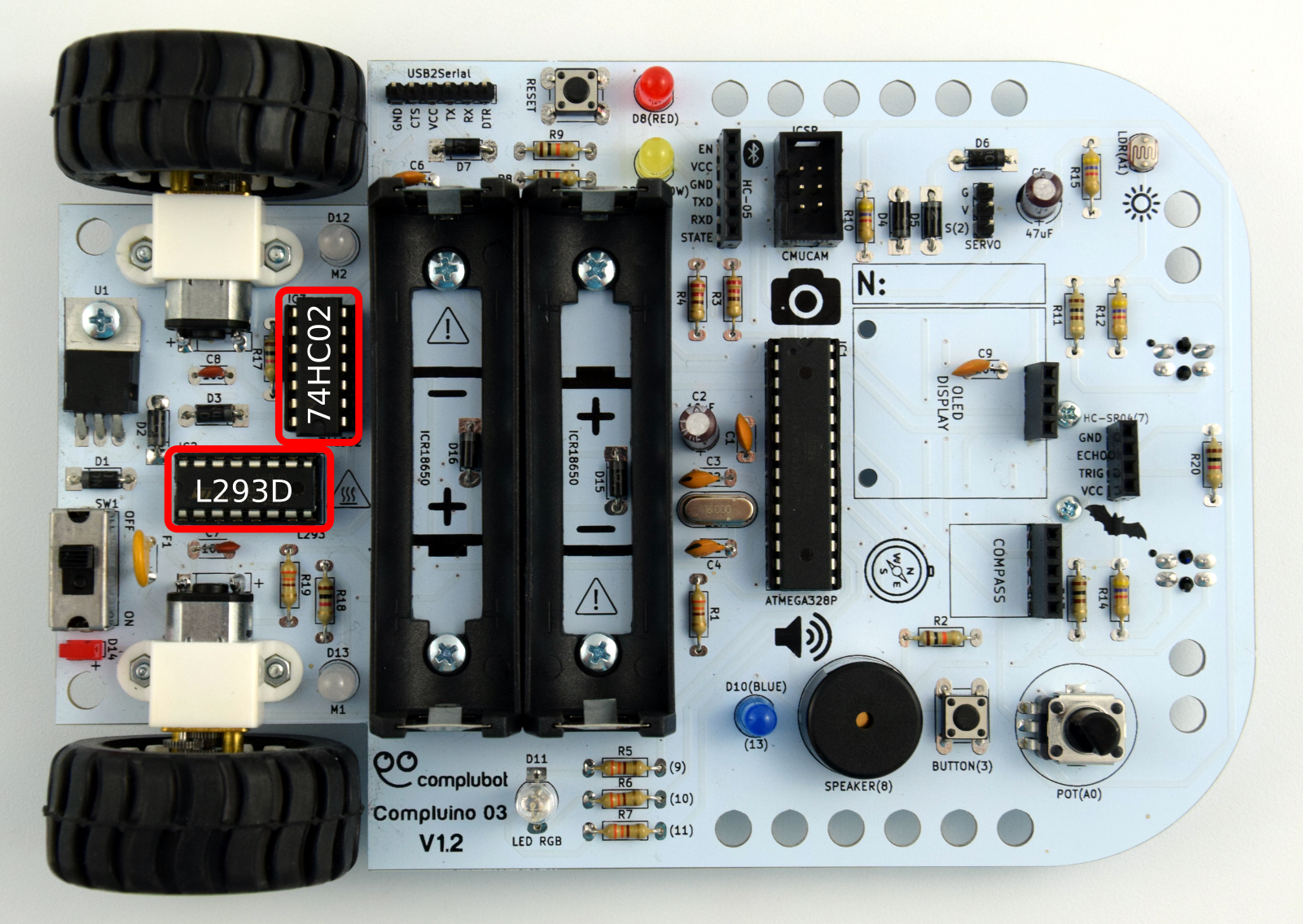
Una vez colocados estos circuitos integrados, ponemos las baterías en su lugar (cuidado con la polaridad) y encendemos el robot. En realidad el robot no tiene que hacer nada distinto a lo que hacía en el apartado anterior: el led azul parpadea. Pero que siga haciendo esto con todos los integrados conectados es una buena señal. Si esto no ocurre:
- Revisa la polaridad de las baterías
- Mira que todos los pines de los circuitos integrados hayan entrado bien en el zócalo, sin doblarse
- En ningún caso sigas con el proceso de montaje sin solucionar este problema
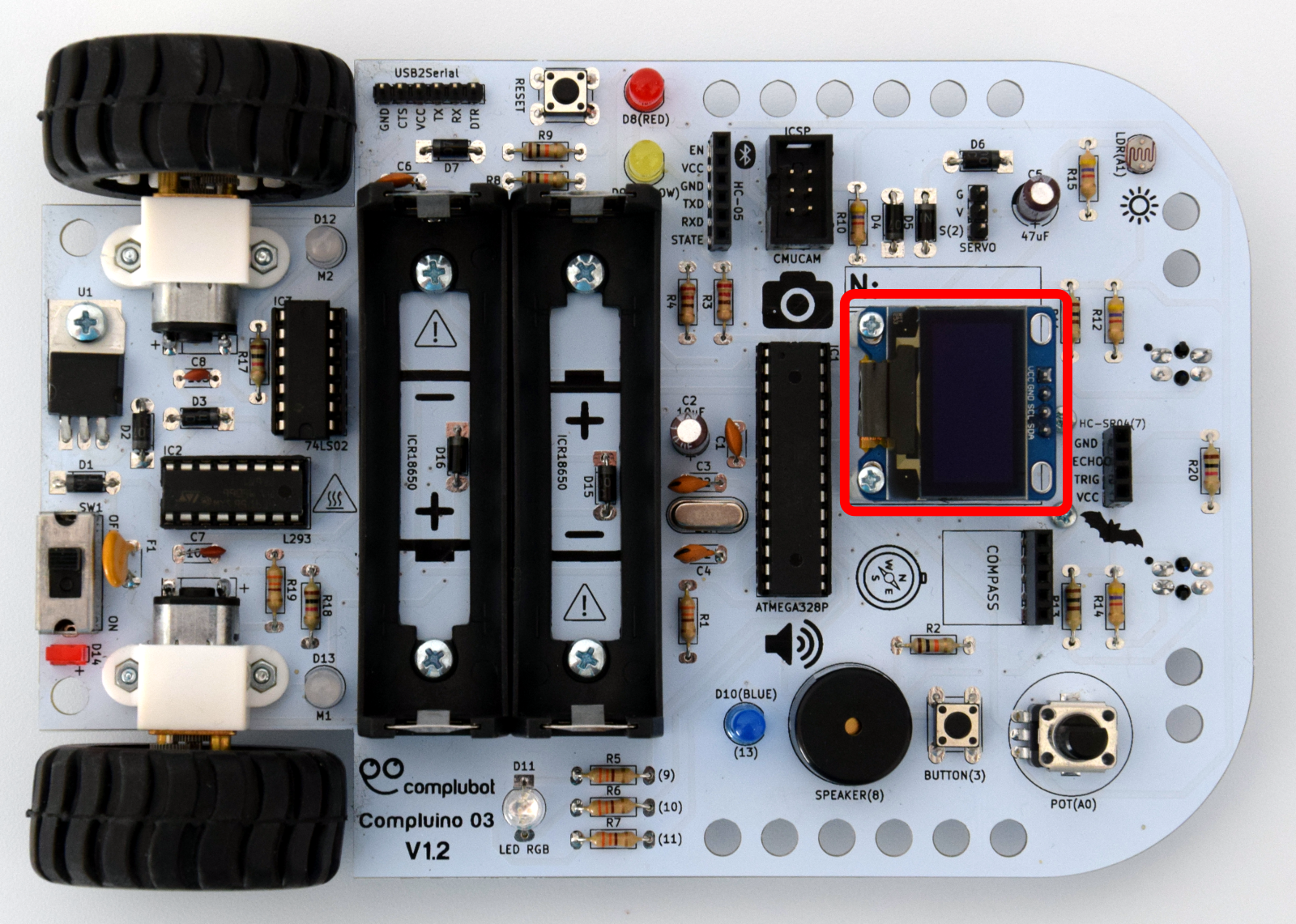
Paso 27 – Pantalla OLED
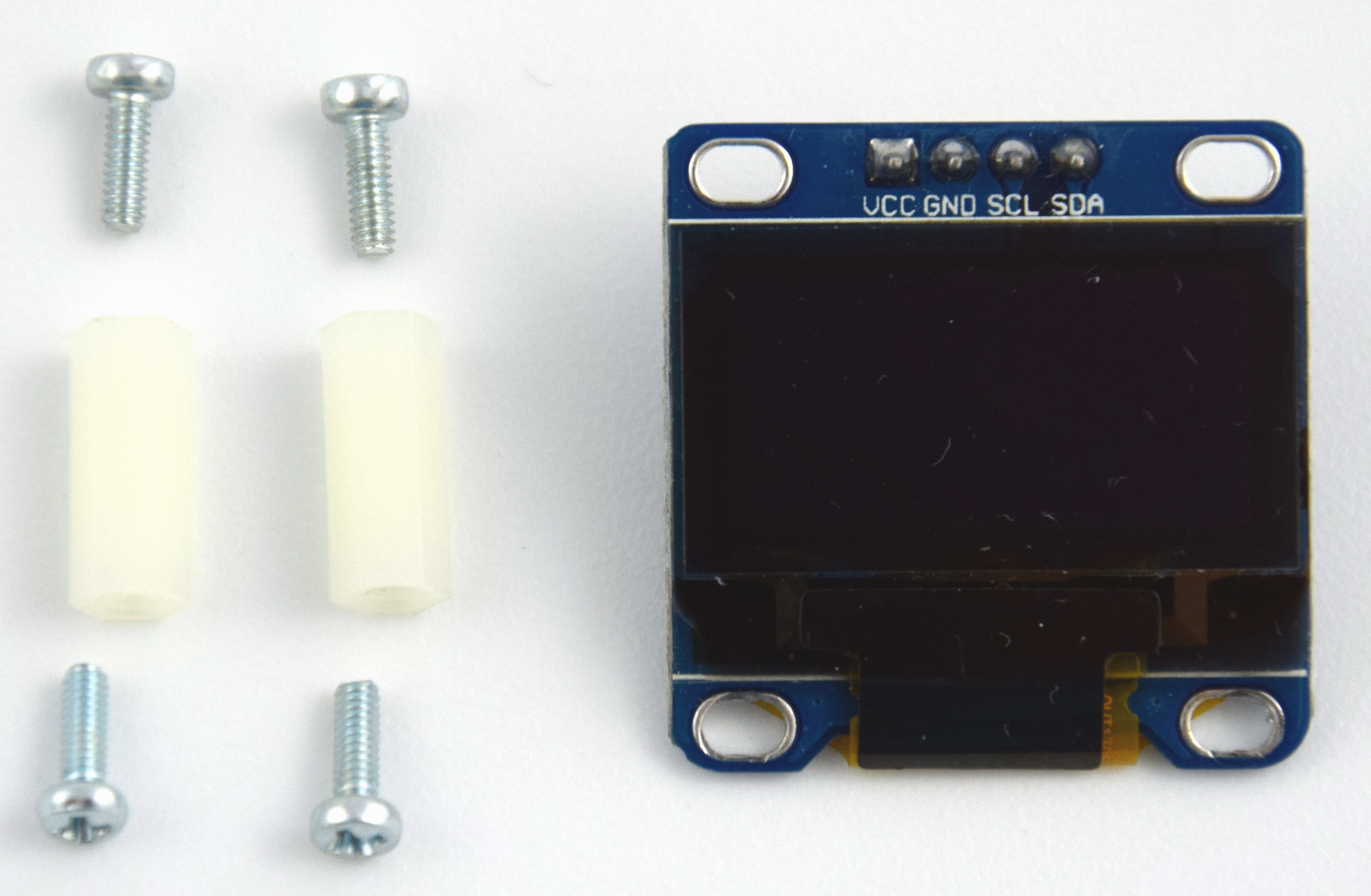
El módulo de la pantalla OLED ya viene de fábrica con el conector de la tira de pines ya soldado, así que solo tenemos que conectarlo y sujetarlo mecánicamente con dos separadores de M2 x 12mm y cuatro tornillos de M2 x 6mm. Para apretar los tornillos usaremos un destornillador de estrella (PH1). Te recomendamos seguir el siguiente orden de montaje:
- Poner dos tornillos de M2 x 6mm en la parte inferior del circuito impreso, enroscándolos un poco a los separadores usando la mano
- Enchufar el módulo de la pantalla OLED en el conector
- Colocar los dos tornillos de M2 x 6mm en la parte superior
- Terminar de apretar todos los tornillos
Paso 28 – Brújula electrónica
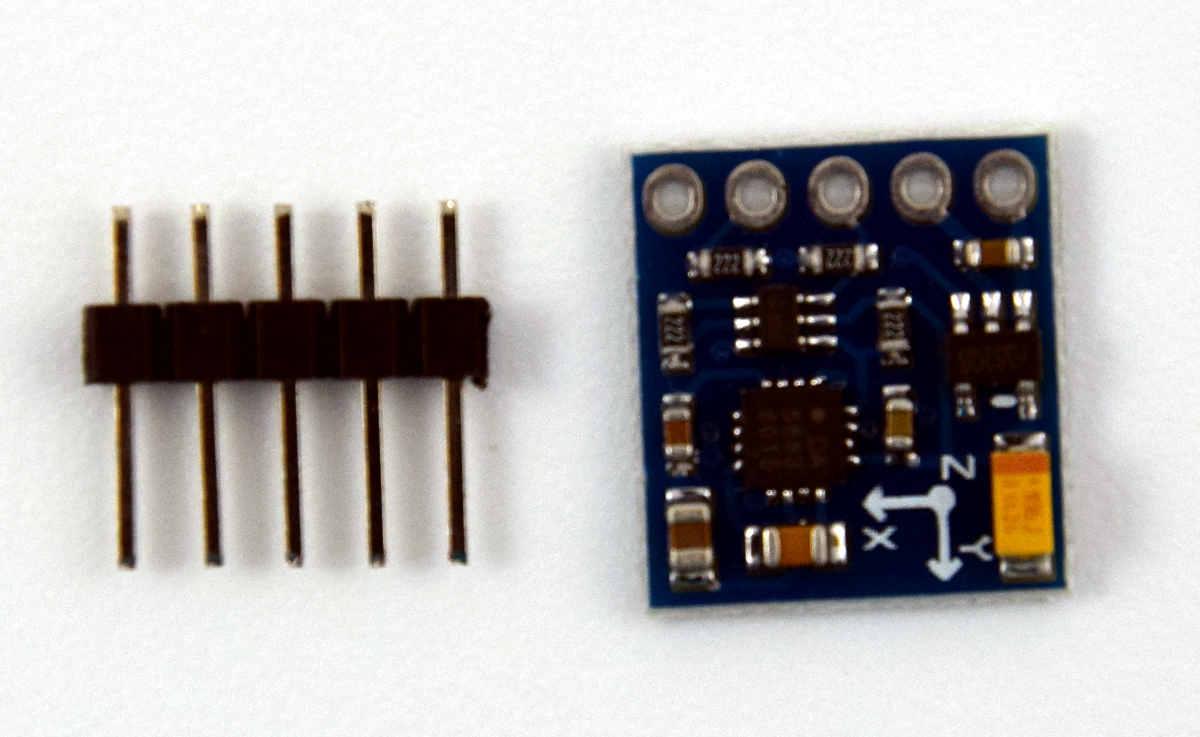
Compluino 03 viene equipado por un magnetómetro HMC5883L. Este sensor, fabricado por Honeywell, opera como un sensor de orientación (brújula) de tres ejes, que se conecta con el microcontrolador principal mediante un bus I2C.
En la actualidad se están comercializando módulos más baratos de este tipo que, aunque se llaman HMC5883L, en realidad incluyen un sensor QMC5883L fabricado por la empresa china QST. El QMC5883L no es compatible con el original HMC5883L, es más, la calidad del QMC es muy inferior a la del HMC. Es por esto por lo que en Complubot seguimos apostando por el sensor original HMC5883L de Honeywell para equipar Compluino 03.
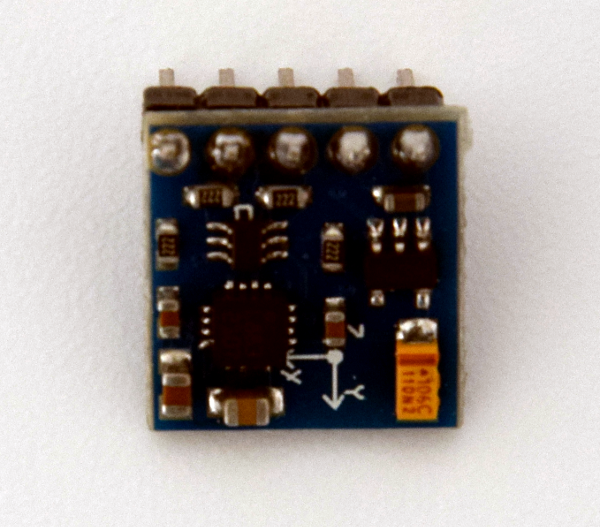
A diferencia de lo que ocurre con la pantalla OLED, en la brújula sí tenemos que soldar la tira de pines en el módulo del sensor. Haremos esto de manera que el conector quede perfectamente perpendicular con el circuito impreso del módulo.
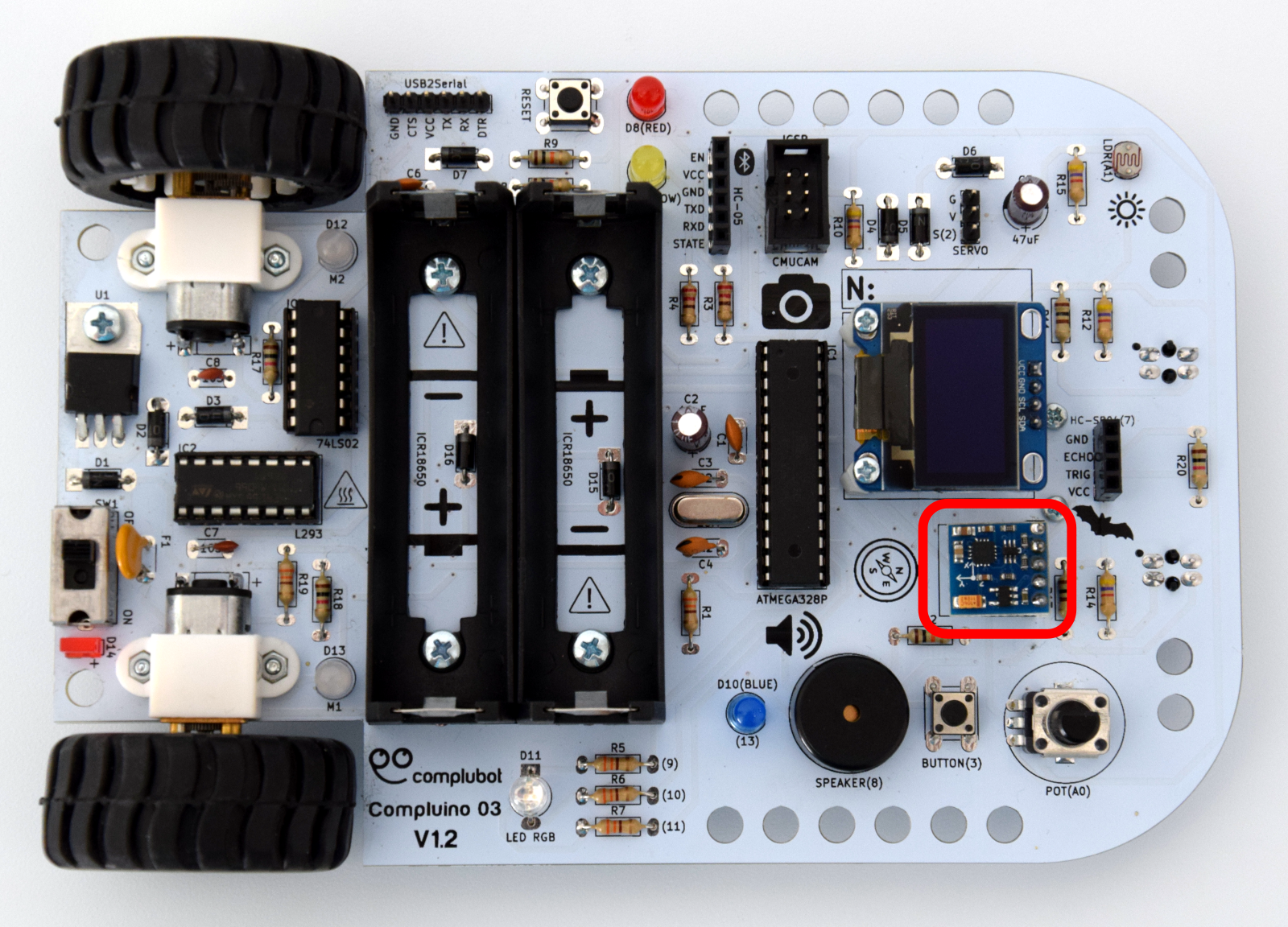
Una vez soldado ya podemos conectarlo en su sitio, tal y como se muestra en la figura inferior.
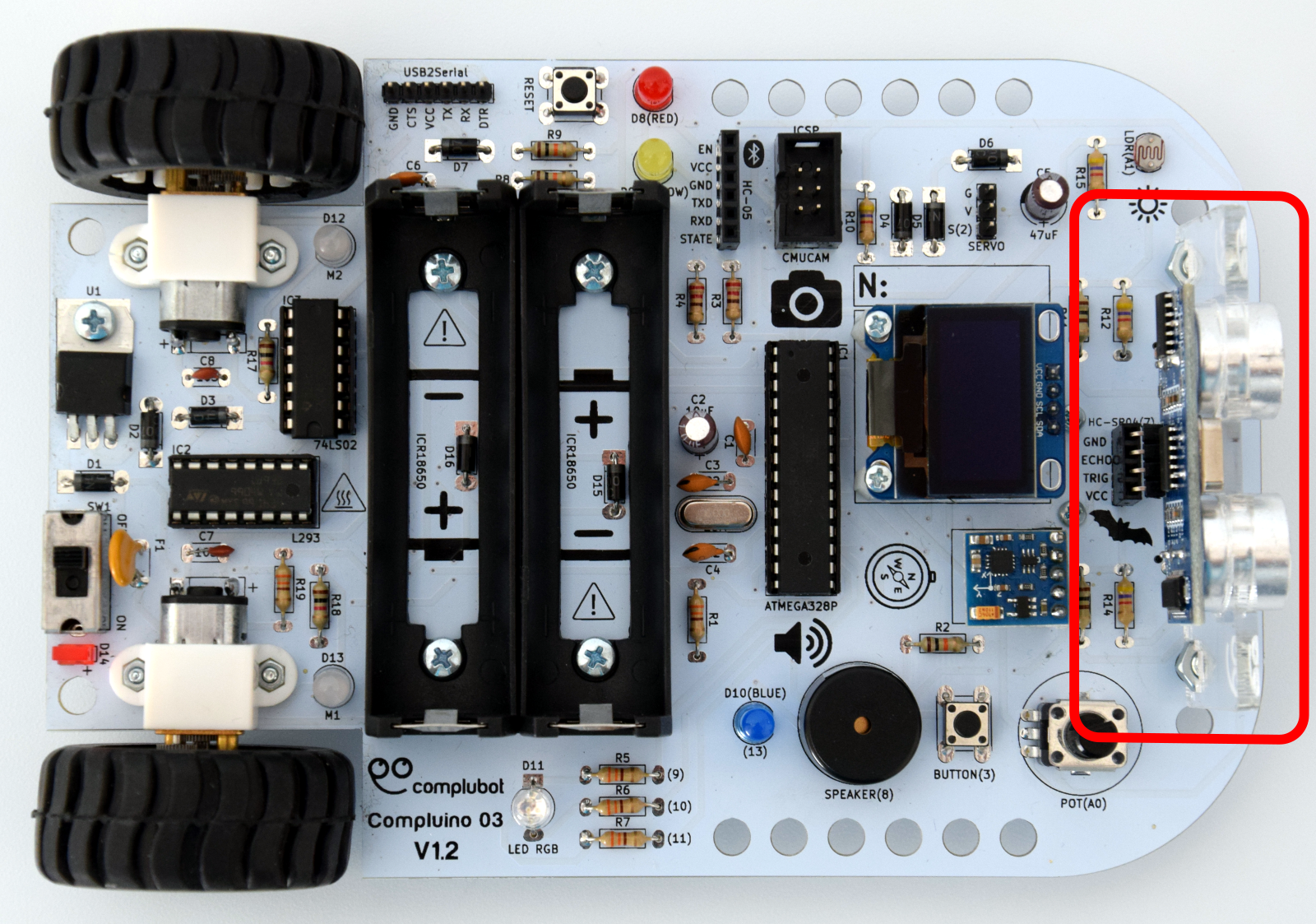
Paso 29 – Sensor ultrasónico de distancias
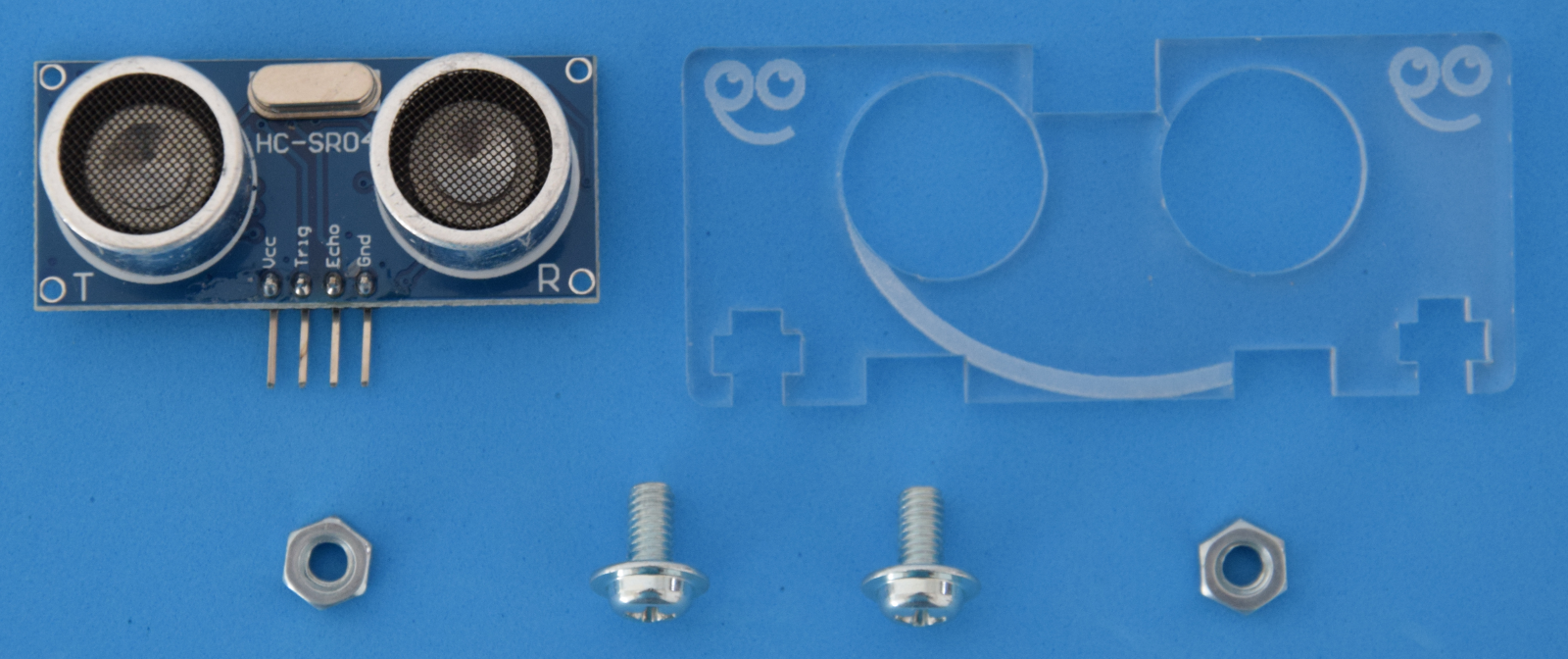
Compluino 03 incorpora en su parte delantera un sensor de distancias por ultrasonidos del tipo HC-SR04. Para colocar este sensor solo hay que enchufarlo en el conector delantero del robot en la posición que se indica en la fotografía inferior.
Para mejorar la sujección mecánica de este sensor podemos usar un soporte de metacrilato (cortado por láser) y dos tornillos con tuercas de M4. Las tuercas se colocan en horizontal en las raguras del soporte (ver imagen inferior) y los tornillos se sujetan desde la parte inferior del circuito impreso.

Importante: el soporte de sujección es una pieza de plástico.Eso significa que no podemos apretar los tornillos muy fuerte a riesgo de partir dicha pieza.

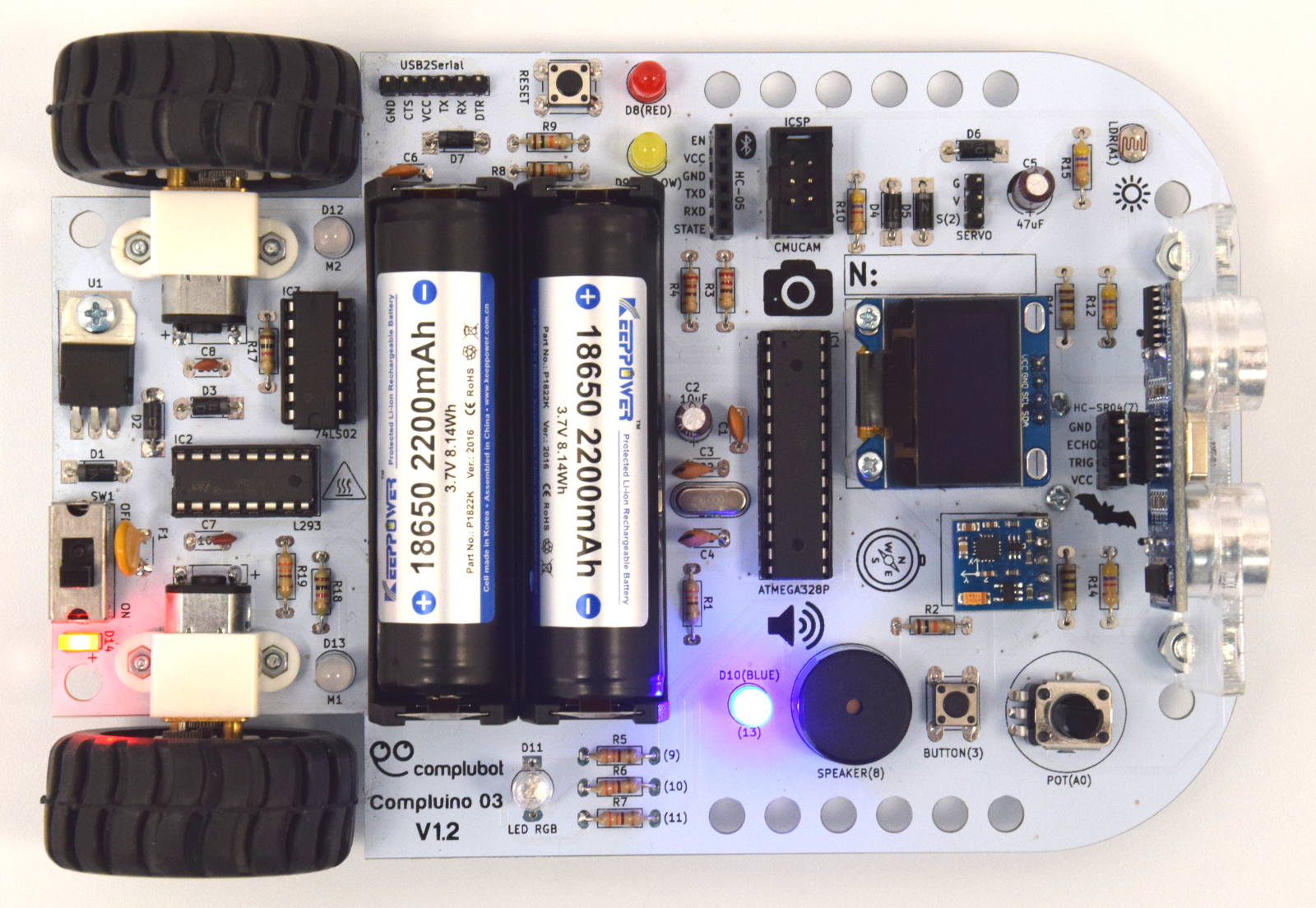
Paso 30 – Prueba final de encendido
Ya hemos llegado al punto en el que hemos terminado el montaje de nuestro robot. Ahora solo queda poner de nuevo las baterías y comprobar que el led rojo rectanguar se enciende y el led azul parpadea. El resto de los módulos y elementos no harán nada más ya que aún no hemos puesto en el robot ningún programa que se encargue de ello.
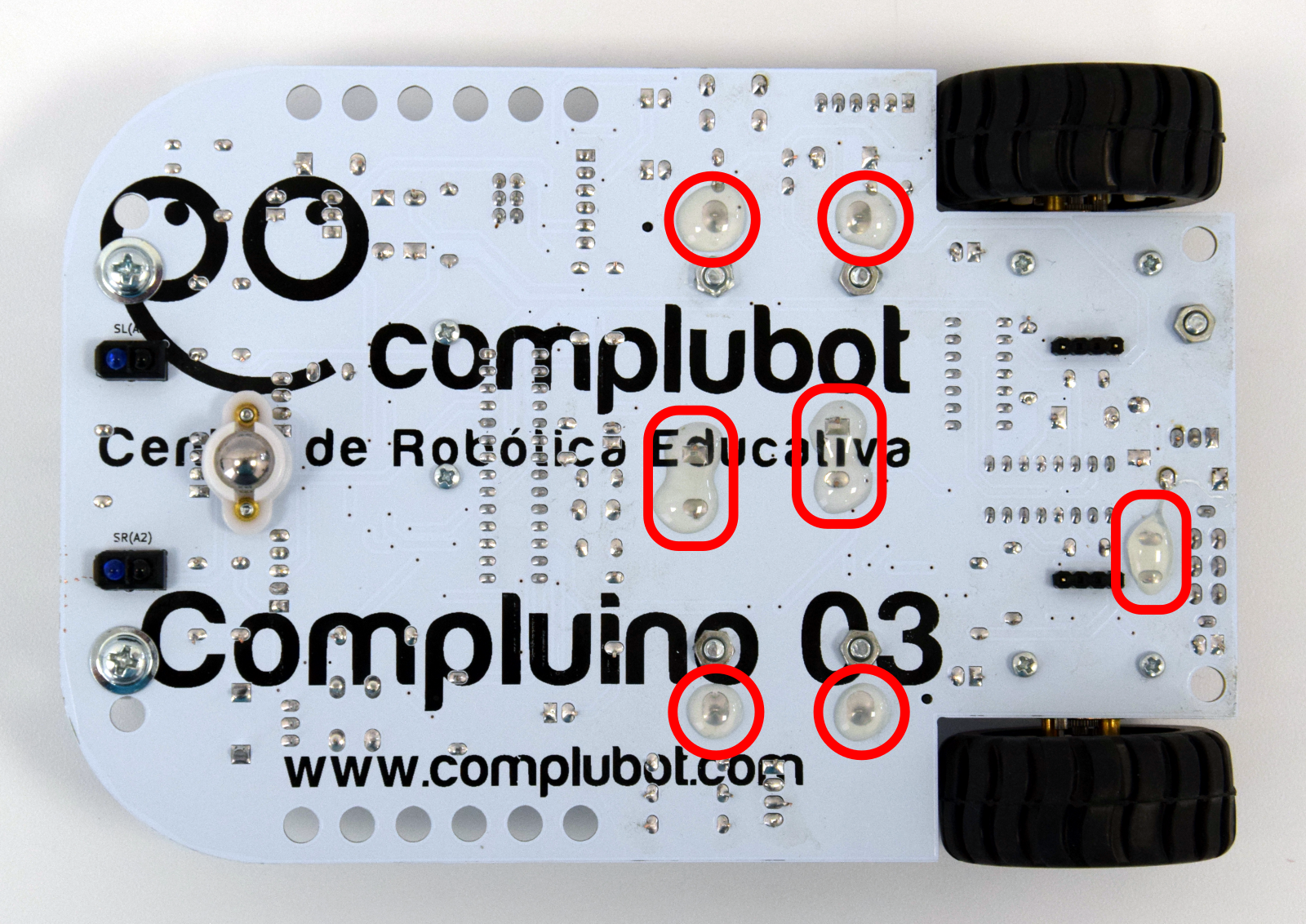
Paso 31 – Aislamiento de los puntos sensibles con termo-cola
Aunque Compluino 03 dispone de varios sistemas de seguridad en su sistema de alimentación (baterías protegidas contra sobrecarga y cortocicuito, diodos para bloquear inversión de polaridad y un polifusible para proteger todo el robot). Para una mayor seguridad en el funcionamiento y uso de este robot recomendamos aislar eléctricamente los terminales de alimentación que se encuentran entre las baterías y el polifusible.

Para realizar esta operación usaremos una pistola de termocola con la que podemos depositar unos puntos de cola caliente en las zonas indicadas de la parte inferior de la placa de circuito impreso, tal y como se muestra en la siguiente imagen.
Puesta en marcha del robot
Una vez hayamos completado exitosamente el montaje del robot Compluino 03, o si hemos comprado una unidad ya montada, podemos continuar con el proceso de puesta en marcha del robot dando los primeros pasos en el uso y programación de esta potente plataforma educativa.